Temel grup, Henri Poincaré'in 1895'te yayınladığı "Analysis Situs"[1] adlı makalesinde tanımlanmıştır. Kavram, Bernhard Riemann, Poincaré ve Felix Klein'ın çalışmalarıyla Riemann yüzeyleri teorisinden ortaya çıkmıştır. Karmaşık değerli fonksiyonların monodromik özelliklerini açıkladığı gibi kapalı yüzeylerin tam bir topolojik sınıflandırılmasını sağlar.
Yollar ve Homotopiler
Bu bölümde topolojik uzayları ele alacağız. Yolların tanımında kullanacağımız aralığı kapalı aralığı olacaktır. Son olarak, başlangıç noktası ve bitiş noktası olan yollara ’den ’ya giden yollar diyeceğiz.
Yol
Bir uzayı alalım. Bir sürekli fonksiyonuna uzayında bir yol denir. Böyle bir yolu için noktası başlangıç noktası ve noktası bitiş noktası olarak adlandırılır.
olsun. Başlangıç ile bitiş noktaları sırasıyla ve olan ve 'den uzayına giden bütün yolların kümesi olarak tanımlanır.
Şekil 1: 'in grafiği üzerinde kırmızı ok ile belirtilen oryantasyonu.
Örnekler
İlk örnek olarak, uzayında bir fonksiyonunu olarak tanımlayalım. uzayındaki yollar genellikle , fonksiyonu ile temsil edilir. Burada ve sürekli fonksiyonlardır. Şimdi bir yolunu şeklinde tanımlayalım. Bu durumda
• noktası, başlangıç noktası ve
• bitiş noktasıdır.
Ayrıca üzerindeki oryantasyonun, fonksiyonunun görüntüsünün yönlendirmesini içerdiğinin de altını çizelim.
Diğer bir örnek olarak da bir fonksiyonunu ele alalım ve olsun.
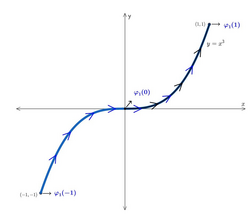
fonksiyonunun grafiği uzayı olmak üzere bu uzaydaki yollara bakalım. Bir fonksiyonunu olarak tanımlayalım.
olduğunu görüyoruz. ’in bileşenleri olan ve , üzerinde sürekli birer fonksiyon olduğundan 'in fonksiyonu için bir yol olduğunu söyleyebiliriz.
Şekil 2: Mavi oklar fonksiyonunu ve siyah oklar yolunu temsil etmektedir.
Şimdi fonksiyonunu ele alalım, öyle ki olsun.
, bir yol değildir çünkü tanım kümesi değildir. fonksiyonunu kullanarak grafiğinin üzerinde başka bir yol bulacağız.
Bunun için, sürekli ve daima artan bir fonksiyon tanımlayalım. fonksiyonu olarak tanımlansın.
Sonra bileşke fonksiyonu yazalım. öyle ki olsun.
ve olmaktadır.
Bu bileşke fonksiyonunun bileşenleri ve , tanım aralığında sürekli fonksiyon olduklarından bu bileşke fonksiyonun sürekli olduğu sonucuna ulaşılır.
Sonuç olarak , uzayında bir yol olur.
Şekil 3: ve yolları.
Ters Yol
’den ’ya giden bir yolu için, ters yolu olarak tanımlanır. Bu durumda yolunun başlangıç noktası ve bitiş noktası olur.
Örnek olarak, yolunu olarak tanımlayalım. Bu durumda ve olur.
üzerindeki oryantasyonu ters çevirirsek, olarak tanımlı olan ters yolunu elde ederiz (Şekil 3).
ve , , olduğunu not edelim.
Şekil 4: Birim çember ve üzerindeki yolu (kırmızı oklarla gösterilmiştir.)
birim çember olmak üzere, fonksiyonunu [2] olarak tanımlayalım.
Bu fonksiyon aşağıdaki özellikleri sağlamaktadır:
• süreklidir, çünkü üstel fonksiyonun sürekli olduğunu biliyoruz.[3]
•, , , , .
Bu nedenle, birim çember üzerindeki pozitif yönlü bir yoldur (Şekil 4).
Birim küre üzerinde yol örneğinde ise, üzerindeki birim küreyi ele alalım: .
fonksiyonunu şeklinde tanımlayalım. Bu şekilde tanımlı fonksiyonu bariz bir şekilde süreklidir çünkü kosinüs ve sinüs fonksiyonları süreklidir.
Sonuç olarak, ve olur. Bu yüzden, fonksiyonu üzerinde bir yoldur ve oryantasyonu Şekil 5’teki gibidir.
Şekil 5
Şekil 6
Diğer yandan, , biçiminde tanımlı olan fonksiyon süreklidir ve olduğundan fonksiyonu üzerinde başka bir yola örnektir (Şekil 6).
Homeomorfizma
Herhangi ve topolojik uzayları arasında bir homeomorfizma, birebir ve örten bir fonksiyon şeklinde tanımlanır; ve sürekli fonksiyonlardır.
Tanım
’dan ’ya giden daima artan homeomorfizmaların kümesi şu şekilde tanımlanır:.
Önermeler
kümesi fonksiyon bileşkesi altında bir gruptur.
Kanıtı için, önce kümesinin işlemi altında kapalı olduğunu göstermek yeterlidir. Herhangi seçelim. olduğunu göstereceğiz.
, daima artan ve sürekli bir fonksiyon olup tersi de süreklidir. Aynı şekilde için de aynı özellikler sağlanır. İki artan fonksiyonun bileşkesi de artan olacağından fonksiyonu da artan olur.[4]
İki sürekli fonksiyonun bileşkesi de sürekli bir fonksiyon olduğundan fonksiyonu da sürekli olur.
Öte yandan, ve fonksiyonlarının sürekli olduğunu biliyoruz. O halde fonksiyonu da sürekli olur. Sonuç olarak elde ederiz.
Şimdi () kümesinin grup aksiyomlarını (bileşim, birim eleman, terslenebilme) sağladığını gösterelim.[5]
•Bileşim özelliği: Herhangi seçelim. Rastgele bir elemanı alalım. O halde,
• ve • olduğundan her için olur.
•Birim eleman: fonksiyonu, olduğunda ()’nun birim elemanıdır çünkü (birim fonksiyon) süreklidir, birebir ve örtendir, daima artandır.
Öte yandan ters fonksiyonu da süreklidir çünkü her için .
Sonuç olarak her için olmaktadır.
•Terslenebilme: Herhangi bir alalım. ’ın tanımından dolayı, ’in daima artan, birebir, örten ve sürekli olduğunu ve ’in de sürekli olduğunu biliyoruz.
olduğunu göstermek gereklidir. Bunun için, ’in daima artan olduğunu göstermek yeterlidir.
Herhangi alalım ve olduğunu varsayalım. olduğunu gösterelim.
daima artandır ve olduğu için olur. ’in birebir ve örtenlik özelliğinden dolayı ve olan biricik elemanları vardır.
daima artan ve olduğu için, olur. Bu yüzden ve olur. Sonuç olarak, işlemi altında bir gruptur.
Eğer ise ve olur.
Kanıtını şöyle açıklayabiliriz; herhangi alalım; yani sürekli, daima artan ve birebir-örten bir homeomorfizmadır. O halde ’ fonksiyonu da süreklidir.
olsun, ki bu anlamına gelir. aralığının bağlantılı (connected) olduğunu biliyoruz.[6] O zaman sürekli olduğundan ’in de bağlantılı olduğunu söyleyebiliriz.
birebir ve örten olduğundan, olur. Fakat bağlantılı değildir. Bu yüzden varsayımıyla bir çelişki elde ederiz. Yani olur.
Şimdi olduğunu gösterelim. olduğunu varsayalım. fonksiyonu daima artan ve olduğundan, olur; bu da demektir.
olduğundan değeri ’den büyük olamaz. O halde olur. Aynı muhakeme ile sonucu elde edilir.
Sonuç olarak, her için, ve olur.
Yollar üzerinde denklik bağıntısı
uzayında yollarını düşünelim. Eğer eşitliğini sağlayan bir varsa, o halde denilir.
•yansıma: herhangi bir yol olsun. Eğer fonksiyonunu şeklinde tanımlı birim fonksiyon alırsak olur. Dolayısıyla olur.
•simetri: herhangi iki yol olsunlar. olduğunu varsayalım ve olduğunu gösterelim.
ise olacak şekilde bir vardır. fonksiyonunun birebir ve örten olduğunu biliyoruz; bu yüzden şöyle yazabiliriz:
. Yani öyle bir fonksiyon bulmuş olduk ki ve oldu. Sonuç olarak olur.
•geçişme: herhangi üç yol olsunlar. ve olduklarını varsayalım ve olduğunu gösterelim.
Varsayımlara göre, ve eşitliklerini sağlayan elemanları vardır. Bu nedenle, ’dir.
olduğundan olur. Yani elemanı eşitliğini sağlar. Dolayısıyla, olur.
Sonuç olarak bir denklik bağıntısıdır.
Homotopi
ve fonksiyonları uzayında iki yol olsun. Bu yolların bir homotopisi, , şeklinde tanımlı ve aşağıdaki şartları sağlayan sürekli bir fonksiyondur.
(i) Her sayısı için, , ’den ’ya giden bir yol belirtir.
(ii) ’den ’ya giden , yolları için ve ’dir. ve yolları bu şekilde bir homotopisi ile bağlanırlarsa ve homotopiktirler denilir ve şeklinde gösterilir.
Önermeler
Yolların bileşkesi, yolların denklik sınıfları üzerinde iyi tanımlıdır.
Önermenin kanıtını şöyle açıklayabiliriz: , , ve : şeklinde tanımlı yollar olsun. . Eğer ve olduğunda denkliği sağlanıyorsa bu bileşke işlemi iyi tanımlıdır. arasında homotopisi ve arasında ise homotopisi tanımlı olsun. homotopisini aşağıdaki şekilde tanımladığımız zaman yolların bileşkesinin iyi tanımlı olduğunu göstermiş oluruz.
olduğunda eşitliklerini elde ederiz. Bu yüzden denkliği sağlanır. Bu yüzden yolların bileşkesi, yolların denklik sınıfları üzerinde iyi tanımlıdır.
Bir uzayda sabit başlangıç ve bitiş noktaları olan yollar üzerindeki homotopi ilişkisi bir denklik bağıntısıdır. Uzaydaki bir yolunun homotopi sınıfı ile gösterilir.
İspatını yaparken, Homotopi ilişkisinin yansıma, simetri ve geçişme özelliklerini sağladığı göstermeli.[7]
•yansıma: , ’den ’ya giden bir yol olsun. , şeklinde tanımlanmış fonksiyonu ile arasında bir homotopidir; çünkü her için,
fonksiyonu ’den ’ya giden bir yoldur ve ’dir. Sonuç olarak elde edilir.
•simetri: , ’den ’ya giden 2 yol olsun. olduğunu kabul edelim. O halde öyle bir şeklinde tanımlı homotopi vardır ki; her sabit için,
fonksiyonu ’den ’ya giden bir yol olur ve , ’dir.
Şimdi fonksiyonunu şeklinde tanımlayalım. O zaman her sabit için, fonksiyonu ’den ’ya giden bir yoldur ve
ve olur. Sonuç olarak elde edilir.
•geçişme: şeklinde tanımlı 3 yol olsun. ve olduğunu kabul edelim. Göstermemiz gereken; dir.
ve olduğundan öyle ve homotopileri vardır ki; , ve , , ve
’dir. Şimdi bir fonksiyonunu
şeklinde tanımlayalım. Açıkça görüyoruz ki; fonksiyonu noktası dışında her yerde süreklidir.
Öte yandan için ve olmaktadır.
Dolayısıyla fonksiyonu noktasında da süreklidir. Ayrıca, ve olduğunu görüyoruz.
Sonuç olarak
elde edilir.
gruptur.
Kanıtını göstermek için, örnek olarak ve , 'a dayalı döngülerinin homotopi sınıflarının kümesi olsun.
•Birim elemanı , olan döngüsünün sınıfıdır. Herhangi bir döngüsü için eşitliği sağlanır ve homotopi şu şekilde tanımlanır: .
• , 'te bulunan herhangi bir döngü olsun. 'in tersini olarak tanımlayalım. 'in tersini yönünü değiştirerek tanımladık. Şimdi ise arasındaki homotopi şu şekilde tanımlanır: .
• herhangi üç eleman olsun. Şimdi ise olduğunu gösterelim. Bu koşulu sağlayan homotopi şu şekilde tanımlanır: .
Birim elemanın varlığı, ters elemanın varlığı ve geçişme özelliğini sağladığından ötürü bir gruptur.
Örnekler
1 noktasına dayalı birim çemberin temel grubu tam sayılar grubuna izomorftur, şeklinde gösterilir: .
Sekiz şeklinin temel grubu iki eleman tarafından üretilen serbest gruptur.
Dış bağlantılar
Vikikitap
Vikikitapta bu konu hakkında daha fazla bilgi var:
Flash animation for learning the unit circle 4 Mayıs 2021 tarihinde Wayback Machine sitesinde arşivlendi.
GonioLab: Visualization of the unit circle, trigonometric and hyperbolic function
https://web.stanford.edu/~aaronlan/assets/fundamental-group.pdf 11 Mayıs 2021 tarihinde Wayback Machine sitesinde arşivlendi.
Hacettepe Journal of Mathematics & Statistics: https://dergipark.org.tr/en/download/article-file/808791 12 Mayıs 2021 tarihinde Wayback Machine sitesinde arşivlendi.
Kaynakça
İngilizce vikipedi24 Ekim 2014 tarihinde Wayback Machine sitesinde arşivlendi.
Ronald Brown, Topology and Groupoids, 2006
Allen Hatcher, Algebraic Topology [1]19 Mayıs 2018 tarihinde Wayback Machine sitesinde arşivlendi.
^"Analysis Situs". 10 Eylül 2014 tarihinde kaynağından arşivlendi.
^"Euler Formülü". 18 Nisan 2021 tarihinde kaynağından arşivlendi. Erişim tarihi: 9 Haziran 2022.
^"Continuity of the exponentiel fonctions". 11 Ocak 2004 tarihinde kaynağından arşivlendi.
^"Bileşke Fonksiyon Özellikleri" (PDF). 12 Mayıs 2021 tarihinde kaynağından (PDF) arşivlendi.
^"Grup Özellikleri" (PDF). 20 Aralık 2020 tarihinde kaynağından (PDF) arşivlendi.
^"Connected Sets in R" (PDF). 7 Mayıs 2021 tarihinde kaynağından (PDF) arşivlendi.
^"Denklik bağıntısı özellikleri" (PDF). 11 Mayıs 2021 tarihinde kaynağından (PDF) arşivlendi.

![{\displaystyle \ [0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dd524a5e344fc986442d3b1012c9c75c6a556e28)



![{\displaystyle \alpha \colon [0,1]\to X}](https://wikimedia.org/api/rest_v1/media/math/render/svg/01a419385aad2731115d2c7b9a5d529ba1ea149e)






![{\displaystyle \ I=[0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a02028e2566e08e610c2cb1c22e25f87f866ef56)
![{\displaystyle \ \mathbf {P} (x,y)=\{f\colon [0,1]\to X|f(0)=x,f(1)=y\}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7f5edaedd8807f9071c9718f9bdf421a12233637)


![{\displaystyle \ X=[0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0c7bb6d25f662e6e99751cd4d5576115b339bd39)
![{\displaystyle \ f\colon [0,1]\to X}](https://wikimedia.org/api/rest_v1/media/math/render/svg/edaf63107fa480a71a4dcf6ab249866a101194c6)



![{\displaystyle \varphi \colon [0,1]\to }](https://wikimedia.org/api/rest_v1/media/math/render/svg/d9ece8834cb0fbc6f880b07dd1a9f866bc0909cd)







![{\displaystyle \ g\colon [-1,1]\to [-1,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/393caf512dd24ea638e4332429974e2f46c0bf24)











![{\displaystyle \varphi _{1}\colon [-1,1]\to }](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c393fa1fd5f38b59c6f64da00b29ac84456169c)

![{\displaystyle I=[0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/87ec65159c44769434523e46928bc1b82681f842)

![{\displaystyle \ f\colon I\to [-1,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/61267038619911fe1d6493c3e79a9e926c05fe0d)

















![{\displaystyle \varphi \colon I\to [-1,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cc7adb34781f121cf02d671939651ec2441b9d07)



![{\displaystyle {\bar {\varphi }}\colon I\to [-1,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1276e338ca315356e956759dbe566ce6c50c54ec)














![{\displaystyle \varphi \colon [0,1]\to S^{2}\subset \mathbb {R} ^{3}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a32186b839b20760c3c654fbaa176b00bf5c021f)




 Şekil 5
Şekil 5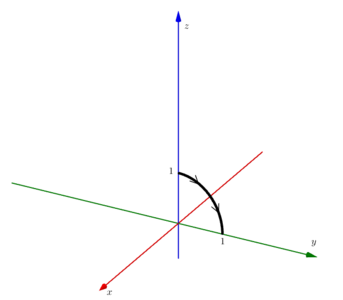 Şekil 6
Şekil 6

















































![{\displaystyle (0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7e70f9c241f9faa8e9fdda2e8b238e288807d7a4)

![{\displaystyle h((0,1])}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec64937623d1997e066a2251f3e13ec87610d1db)
![{\displaystyle h((0,1])=[0,x)\cup [x,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cc306796eb2de517551aa543398da18fa61521b8)
![{\displaystyle [0,x)\cup [x,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/358cdfe41e6a6955e23ac30f9b7747c5fe90d1e8)






![{\displaystyle h\colon [0,1]\to [0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/42e9fb20668fbadd0b40f899072132002cb6324c)



































![{\displaystyle [0,1]\rightarrow X}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c5ddfe9e7549226d960b776e7cf6f55944c9045e)










![{\displaystyle [\varphi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2fbf43266da81d242bddec8bf1fc7af510b13f0a)




































![{\displaystyle e_{x_{0}}:[0,1]\longrightarrow X}](https://wikimedia.org/api/rest_v1/media/math/render/svg/07e7e2856f2fe11c59873c345ddda42b666a1380)

![{\displaystyle [e_{x_{0}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/56efa426e7a621db98d034f7b05377b7aa76ce27)
![{\displaystyle [e_{x_{0}}]\star [f]=[f]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/77f99c4e3c904f06542a6c3db3b381a2e0d4a865)





![{\displaystyle [f]\star ([g]\star [h])=([f]\star [g])\star [h]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d724da4251abe28485de7c0e2ecd2cd10e810131)












