Normală

În geometrie o normală este un obiect, cum ar fi o dreaptă, o rază sau un vector, care este perpendicular pe un obiect dat. De exemplu, dreapta normală la o curbă plană într-un punct dat este dreapta (infinită) perpendiculară pe tangenta la curbă în acest punct.Un vector normal poate avea lungimea 1 (un versor) sau lungimea sa poate reprezenta curbura obiectului (un vector de curbură); semnul algebric al acestuia poate indica pe care parte (interior sau exterior) este.
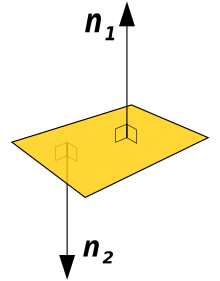
În spațiul tridimensional o normală la suprafață sau, simplu, normală la o suprafață în punctul P este un vector perpendicular pe planul tangent la suprafață în P. Cuvântul „normal” este folosit și ca adjectiv: o dreaptă normală la un plan, componenta normală a unei forțe, vectorul normal etc. Noțiunea de normalitate se generalizează la ortogonalitate (unghiuri drepte).
Noțiunea a fost generalizată la varietăți diferențiabile(d) de dimensiune arbitrară încorporate într-un spațiu euclidian. Spațiul vectorial normal sau spațiul normal al unei varietăți în punctul P este mulțimea de vectori care sunt ortogonali cu spațiul tangent(d) în P. Vectorii normali prezintă un interes deosebit în cazul curbelor și suprafețelor netede.
Distanța normală a unui punct Q la o curbă sau la o suprafață este distanța euclidiană dintre Q și proiecția sa perpendiculară pe obiect (în punctul P de pe obiect a cărui normală conține Q).
Normala la suprafețe în spațiul tridimensional

Calculul normalei la o suprafață
Pentru un poligon convex (cum ar fi un triunghi), o normală a suprafeței poate fi calculată ca vectorul produs vectorial al două laturi (neparalele) ale poligonului.
La un plan dat de ecuația vectorul este normal.[1][2]


Pentru un plan a cărui ecuație este dată în formă parametrică:

unde este un punct din plan, iar sunt vectori neparaleli îndreptați de-a lungul planului, o normală la plan este un vector normal pe ambii și care poate fi calculat prin produsul vectorial [2][3]





Dacă o suprafață (nu neapărat plană) în spațiul tridimensional este parametrizată de un sistem de coordonate curbilinii cu și variabile reale, atunci o normală la S este prin definiție o normală la un plan tangent, dată de produsul vectorial al derivatelor parțiale






Dacă suprafața este dată sub formă implicită(d) ca un set de puncte care satisfac atunci o normală într-un punct de pe suprafață este dată de gradientul



deoarece gradientul este perpendicular în orice punct al setului .
Pentru suprafața din care este graficul funcției o normală orientată în sus poate fi găsită fie din parametrizarea dând



sau mai simplu din forma sa implicită rezultând


Deoarece o suprafață nu are un plan tangent într-un punct singular (de exemplu, vârful unui con), nu are o normală bine definită în acel punct. În general, la o suprafață care este Lipschitz continuă este posibil să se definească o normală aproape peste tot(d).
Alegerea normalei

Normala unei (hiper)suprafețe este de obicei scalată pentru a avea lungimea unitate, dar nu are o direcție unică, deoarece opusa sa este și ea o normală unitate. Pentru o suprafață care este frontiera unei mulțimi tridimensionale se poate distinge între normala orientată spre interior și normala orientată spre exterior. Pentru o suprafață orientată, normala este de obicei determinată de regula mâinii drepte sau de analoaga sa în dimensiuni superioare.
Hipersuprafețe în spațiul n-dimensional
La un hiperplan (n−1)-dimensional dintr-un spațiu n-dimensional dat de reprezentarea sa parametrică


unde un punct pe hiperplan, iar pentru sunt vectori liniar independenți de-a lungul hiperplanului, o normală la hiperplan este orice vector din nucleul matricei unde Adică, orice vector ortogonal cu toți vectorii din plan este prin definiție o normală a suprafeței. Alternativ, dacă hiperplanul este definit ca setul de soluții al unei singure ecuații liniare atunci vectorul este o normală.








Definiția unei normale la o suprafață din spațiul tridimensional poate fi extinsă la hipersuprafețele (n−1)-dimensionale din O hipersuprafață poate fi definită local implicit ca mulțimea punctelor care satisfac o ecuație unde este o funcție scalară. Dacă este diferențiabilă continuu, atunci hipersuprafața este o varietate diferențiabilă în vecinătatea punctelor în care gradientul nu este zero. În aceste puncte un vector normal este dat de gradient:





Dreapta normală este un subspațiu unidimensional cu baza

Note
- ^ Paul A. Blaga, Dreapta și planul în spațiu, Universitatea Babeș-Bolyai, 8 aprilie 2020, accesat 2022-06-20
- ^ a b Plane în spațiu. Breviar teoretic, Universitatea Tehnică „Gheorghe Asachi” din Iași, accesat 2022-06-20
- ^ Paul Popescu, Marcela Popescu, Algebră Liniară și Geometrie Analitică, Universitatea din Craiova, p. 27, accesat 2022-06-20
Legături externe
 | Portal Matematică |
- en Eric W. Weisstein, Normal Vector la MathWorld.
- en An explanation of normal vectors from Microsoft's MSDN
- en Clear pseudocode for calculating a surface normal from either a triangle or polygon.











