Momento polar de inércia
O momento polar de inércia (em inglês: polar moment of inertia), também conhecido como segundo momento polar de área, é uma quantidade usada para descrever resistência à deformação torcional em objetos cilíndricos (ou segmentos de objetos cilíndricos) com uma seção transversal invariante e sem empenamento (deformação fora do plano) significativo.[1] É um constituinte do momento de inércia de área, relacionados através do Teorema dos eixos perpendiculares. Onde o segundo momento de área planar descreve a resistência de um objeto à deflexão quando submetido a uma força aplicada a um plano paralelo ao eixo central, o segundo momento de área polar descreve a resistência de um objeto à rotação quando submetido a um momento aplicado em um plano perpendicular ao eixo central de um objeto. Similar ao segundo momento de área planar (, e ), o segundo momento de área polar é frequentemente denotado como . Enquanto diversos livros-texto de engenharia e publicações acadêmicas também o denotem como ou , deve-se prestar atenção cuidadosa tal que ela não seja confundida com o módulo de torção , usado para objetos não-cilíndricos.







De forma simples, o momento polar de inércia é a resistência de um eixo ou viga de ser distorcido por torção, em função de sua forma. A rigidez vem apenas da área transversal do objeto e não depende da composição do material ou módulo de cisalhamento. Quanto maior a magnitude do momento polar de inércia, maior a resistência à torção do objeto.
Definição



- Nota: Embora tenha se tornado comum encontrar o termo momentos de inércia usado para descrever os segundos momentos de área polar e planar , isso é principalmente uma construção de campos de engenharia. O termo momento de inércia, dentro dos campos da física e da matemática, é estritamente o momento de inércia de massa, ou segundo momento de massa, usado para descrever a resistência de um objeto maciço ao movimento rotacional, não sua resistência à deformação torcional. Enquanto os segundos momentos de inércia polar e planar são integrados sobre todos os elementos infinitesimais de uma determinada área em alguma seção transversal bidimensional, o momento de inércia de massa é integrado sobre todos os elementos infinitesimais de massa em um espaço tridimensional ocupado por um objeto. Simplificando, os segundos momentos de inércia polar e planar são uma indicação de rigidez, e o momento de inércia de massa é a resistência ao movimento rotacional de um objeto massivo.
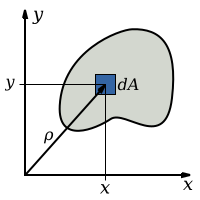
A equação que descreve o momento polar de inércia é uma integral múltipla sobre a área da seção transversal, , do objeto.


onde é a distância ao elemento .
Substituindo as componentes e , usando o teorema de Pitágoras




Dadas as equações do segundo momento de inércia planar


o momento de inércia polar pode ser descrito como a soma dos momentos de inércia planar e , e

Isto é mostrado no teorema dos eixos perpendiculares.[2] Para objetos que tem simetria rotacional, tal como um cilindro ou tubo vazado, a equação pode ser simplificada na forma
- ou


Para uma seção circular de raio r:

Unidade
A unidade SI para momento polar de inércia, como para o momento de inércia de área, é metro na potência quatro (m4).
Referências
Ver também
Ligações externas
- Torsion of Shafts - engineeringtoolbox.com
- Elastic Properties and Young Modulus for some Materials - engineeringtoolbox.com
- Material Properties Database - matweb.com







