Em álgebra linear, um autovetor generalizado (em inglês: generalized eigenvector) de uma matriz quadrada de ordem n é um vetor de ordem n que satisfaz certos critérios que são mais fracos que aqueles de um autovetor ordinário.[1]
Seja um espaço vetorialn-dimensional; seja uma transformação linear em L(V), o conjunto de todas as transformações lineares de sobre si mesmo; e seja a representação matricial de em relação a alguma base ordenada.
Pode não haver sempre um conjunto completo de n autovetores linearmente independentes de que formam uma base completa de . Isto é, a matriz pode não ser diagonalizável.[2][3] Isto ocorre quando a multiplicidade algébrica de pelo menos um autovalor é maior que sua multiplicidade geométrica (a nulidade da matriz , ou a dimensão de seu espaço nulo). Neste caso, é denominado um autovalor defectivo e é denominada uma matriz defectiva.[4]
Um autovetor generalizado correspondendo a , juntamente com a matriz , gera uma cadeia de Jordan de autovetores generalizados linearmente independentes que formam uma base para um subespaço invariante de .[5][6][7]
Usando autovetores generalizados, um conjunto de autovetores linearmente independentes de pode ser estendido para uma base completa para .[8] Esta base pode ser usada para determinar uma matriz quasi-diagonal em forma canônica de Jordan, semelhante a , que é de uso prático no cálculo de certas funções matriciais de .[1] A matriz é também útil na solução de sistemas de equações diferenciais ordinárias onde não precisa ser diagonalizável.[3][9]
Visão geral e definição
Existem diversas formas equivalentes de definir um autovetor ordinário.[10][11][12][13][14][15][16][17] Para nossos propósito aqui, um autovetor associado com um autovalor de uma matriz de ordem × é um vetor não nulo para o qual , sendo a matriz identidade × e o vetor nulo de ordem .[12] Isto é, é o núcleo da transformação linear. Se tem autovetores linearmente independentes, então é similar a uma matriz diagonal . Isto é, existe uma matriz inversível tal que é diagonalizável através da transformação similar .[18][19] A matriz é denominada matriz espectral de . A matriz é denominada matriz modal de .[20] Matrizes diagonalizáveis são de particular interesse, por funções matriciais poderem ser facilmente computadas.[21]
De outro modo, se não tem autovetores linearmente independentes associados, então não é diagonalizável.[18][19]
Definição: Um vetor é um autovetor generalizado de grau m da matriz e correspondente ao autovalor se
mas
[1]
Claramente, um autovetor generalizado de grau 1 é um autovetor ordinário.[22] Toda matriz × tem autovetores generalizados linearmente independentes associados a ela e pode ser mostrado ser similar a uma matriz "quase diagonal" na forma normal de Jordan.[23] Isto é, existe uma matriz inversível tal que .[24] A matriz neste caso é denominada uma matriz modal generalizada de .[25] Se é um autovalor de multiplicidade algébrica , então terá autovetores generalizados linearmente independentes correspondendo a .[8] Este resultado, por sua vez, fornece um método direto para o cálculo de funções matriciais de .[26]
Nota: Para uma matriz de ordem sobre um corpo poder ser expressa na forma normal de Jordan, todos os autovalores de devem estar em . Isto é, o polinômio característico deve ser fatorado completamente em fatores lineares. Por exemplo, se tem elementos pertencentes ao conjunto dos números reais, então pode ser necessário que os autovalores e as componentes dos autovetores tenham valores complexos.[3][4][27]
O conjunto gerado por todos os autovetores generalizados para um dado forma o autoespaço generalizado para .[3]
Exemplos
Aqui estão alguns exemplos para ilustrar o conceito de autovetores generalizados. Alguns dos detalhes são descritos depois.
Exemplo 1
Este exemplo é simples mas ilustra claramente o problema. Este tipo de matriz é usado frequentemente em livros-texto.[2][3][28]
Seja
Então existe apenas um autovalor, , sendo sua multiplicidade algébrica m = 2.
Note que esta matriz está na forma normal de Jordan, mas não é diagonal. Portanto, esta matriz não é diagonalizável. Como há uma superdiagonal, existe um autovetor generalizado de ordem maior que 1 (ou pode-se notar que o espaço vetorial é de dimensão 2, devendo assim existir no mínimo um autovetor generalizado de grau maior que 1). Alternativamente, pode ser computada a dimensão do núcleo (espaço nulo) de como sendo p = 1, e assim existem m – p = 1 autovetores generalizados de grau maior que 1.
O autovetor ordinário é computado da forma usual. Usando este autovetor é computado o autovetor generalizado resolvendo
Explicitando os valores:
Isto se simplifica como
O elemento não tem restrições. O autovetor generalizado de grau 2 é então , onde a pode assumir qualquer valor escalar. A escolha a = 0 é usualmente a mais simples.
Note que
tal que é um autovetor generalizado,
tal que é um autovetor ordinário, e que e são linearmente independentes e constituem assim uma base para o espaço vetorial .
Exemplo 2
Este exemplo é mais elaborado que o Exemplo 1. Infelizmente é dificultoso elaborar um exemplo interessante de baixa ordem.[29] A matriz
tem autovalores e com multiplicidades algébricas e , mas multiplicidades geométricas e .
Os autoespaços generalizados de são calculados abaixo. é o autovetor ordinário associado com . é um autovetor generalizado associado com . é o autovetor ordinário associado com . e são autovetores generalizados associados com .
Isto resulta em uma base para cada um dos autoespaços generalizados de . Juntamente as duas cadeias de autovetores generalizados cobrem o espaço de todo os vetores colunas 5-dimensionais.
Uma matriz "quasi-diagonal" na forma normal de Jordan, similar a é obtida como segue:
onde é uma matriz modal generalizada para , as colunas de são uma base canônica para , e .[30]
Cadeias de Jordan
Definição: Seja um autovetor generalizado de grau m correspondente à matriz e o autovalor . A cadeia gerada por é um conjunto de vetores dado por
(1)
Assim, em geral
(2)
O vetor , dado pela Eq. (2), é um autovetor generalizado de grau j correspondente ao autovalor . Uma cadeia e um conjunto linearmente independente de vetores.[6]
Definição: Um conjunto de n autovetores generalizados linearmente independentes é uma base canônica se for composto inteiramente de cadeias de Jordan.
Então, uma vez determinado que um autovetor generalizado de postom é uma base canônica, segue que os m-1 vetores que estão na cadeia de Jordan, gerados por . também estão em base canônica.[31]
Dado um autovalor de de multiplicidade algébrica Primeiro, determine os postos das matrizes . O inteiro é definido como o primeiro inteiro para o qual possui posto (n sendo o número de linhas e colunas de , isto é, é n × n).
Então define-se:
A variável designa o número de autovetores generalizados linearmente independentes de posto k correspondendo ao autovalor que aparecerá em uma base canônica de . Observa-se que:
.[32]
Cálculo de autovetores generalizados
Nas seções precedentes vimos técnicas para obter n autovetores generalizados linearmente independentes de uma base canônica para o espaço vetorial associado com uma matriz n × n. Estas técnicas podem ser combinadas em um procedimento:
Resolva a equação característica de para os autovalores e suas multiplicidades algébricas ;
Para cada
Determine ;
Determine ;
Determine para ;
Determine cada cadeia de Jordan para .
Exemplo 3
A matriz
tem um autovalor de multiplicidade algébrica e um autovalor de multiplicidade algébrica . Temos n = 4. Para temos .
O primeiro inteiro para o qual tem posto é .
Definimos agora
Consequentemente, existem três autovetores generalizados linearmente independentes; cada qual de postos 3, 2 a 1. Como corresponde a uma simples cadeia de três autovetores generalizados linearmente independentes, sabemos que existe um autovetor generalizado de posto 3 correspondente a tal que
(3)
mas
(4)
As equações (3) e (4) representam sistemas lineares que podem ser resolvidos para . Seja
Então
e
Assim, a fim de satisfazer as condições (3) e (4), devemos ter e . Nenhuma restrição é imposta sobre e . Escolhendo , obtemos
como um autovetor generalizado de posto 3 correspondente a . Note que é possível obter infinitos outros autovetores generalizados de posto 3 escolhendo diferentes valores de , e , com . Nossa primeira escolha, contudo, é a mais simples.[33]
Agora usando as equações (1), obtemos e como autovetores generalizados de postos 2 e 1 respectivamente,onde
e
O autovalor simples pode ser tratado usando técnicas padrão e tem um autovetor ordinário
Uma base canônica para é
e são autovetores generalizados associados com . é o autovetor ordinário associado com .
Deve ser notado que este é um exemplo simples. Em geral, os números de autovetores generalizados linearmente independentes de posto k não serão sempre iguais. Isto é, pode haver diversas cadeias de comprimentos diferentes correspondentes a um particular autovalor.[34]
Matriz modal generalizada
Seja uma matriz n × n. Uma matriz modal generalizada para é uma matriz n × n cujas colunas, consideradas como vetores, forma uma base canônica para e aparece em de acordo com as seguintes regras:
Todas as cadeias de Jordan consistindo de um vetor (isto, um vetor no comprimento) aparece nas primeiras colunas de .
Todos os vetores de uma cadeia aparecem juntos em colunas adjacentes de .
Cada cadeia aparece em na ordem de posto crescente (isto é, o autovetor generalizado de posto 1 aparece antes do autovetor generalizado de posto 2 da mesma cadeia, que aparece antes do autovetor generalizado de posto 3 da mesma cadeia, etc.).[25]
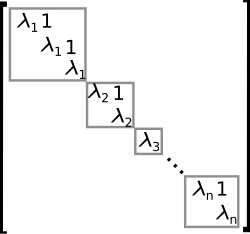
Forma canônica de Jordan
Um exemplo de uma matriz na forma canônica de Jordan. Os blocos cinza são chamados de blocos de Jordan.
Seja um espaço vetorial n-dimensional; seja um mapeamento linear em L(V), o conjunto de todos os mapeamentos lineares de nele mesmo; e seja a representação matricial de em relação a alguma base ordenada. Pode ser mostrado que se o polinômio característico de é fatorado em fatores lineares, tal que tem a forma
onde são os distintos autovalores de , então cada é a multiplicidade algébrica de seu correspondente autovalor e é similar a uma matriz na forma canônica de Jordan, onde cada aparece vezes consecutivas na diagonal principal, e cada componente acima de cada (isto é, na superdiagonal) tem valor 0 ou 1; o elemento acima da primeira ocorrência de cada é sempre 0. Todos os outros elementos são zero. Se é diagonalizável, então todos os elementos acima da diagonal são zero.[35] Note que alguns livros-texto tem os uns na subdiagonal, isto é, imediatamente abaixo da diagonal principal ao invés de na superdiagonal. Os autovalores estão ainda na diagonal principal.[36][37]
Toda matriz n × n é similar a uma matriz na forma canônica de Jordan, obtida através da transformação similar , onde é uma matriz modal generalizada para .[38] (ver Nota acima.)
Exemplo 4
Determinar a matriz na forma canônica de Jordan que é similar a
Solução: A equação característica de é , e então é um autovalor de multiplicidade algébrica três. Seguindo o procedimento das seções precedentes temos
e
Assim, e , que implica que a base canônica para contém um autovetor generalizado linearmente independente de posto 2 e dois autovetores generalizados linearmente independentes de posto 1, ou equivalentemente, uma cadeia de dois vetores e uma cadeia de um vetor . Designando , temos
e
onde é uma matriz modal generalizada para , as colunas de são uma base canônica para , e .[39] Note que desde que autovetores generalizados não são únicos, e desde que algumas das colunas de ambos e podem ser intercambiadas, segue que ambos e não são únicos.[40]
Exemplo 5
No Exemplo 3 encontramos uma base canônica de autovetores generalizados linearmente independentes para uma matriz . Uma matriz modal generalizada para é
Uma matriz na forma canônica de Jordan, similar a é
Três das mais fundamentais operações que podem ser aplicadas sobre matrizes quadradas são adição, multiplicação por um escalar e multiplicação de matrizes.[41] Estas são exatamente as operações necessárias para definir uma função polinomial de uma matriz n × n.[42] Relembrando do cálculo básico que muitas funções podem ser expressas em uma série de Taylor, podemos definir de forma mais geral funções matriciais de forma mais simples.[43] Se é diagonalizável, isto é
com
então
e a determinação da série de Taylor para funções de é significativamente simplificada.[44] Por exemplo, para obter qualquer potência k de , basta calcular , premultiplicar por , e posmultiplicar o resultado por .[45]
Usandoautovetores generalizados podemos obter a forma canônica de Jordan para e estes resultados podem ser generalizados para um método direto para determinação de funções de matrizes não diagonalisáveis.[46]
Considere o problema de resolver o sistema linear de equações diferencias ordinárias
(5)
onde
e
Se a matriz é uma matriz diagonal tal que para , então o sistema (5) reduz-se a um sistema de n equações na forma
(6)
Neste caso, a solução geral é dada por
No caso geral, tenta-se diagonalizar e reduzir (5) para um sistema (6) como a seguir. Se é diagonalizável, então tem-se que , onde é a matriz modal de . Substituindo a equação , (5) toma a forma , ou
A solução de (5) é obtida usando a relação (8).[47]
Por outro lado, se não é diagonalizável, escolhe-se para uma matriz modal generalizada de , tal que é a forma canônica de Jordan normal of . O sistema possui a forma
(9)
onde são os autovalores da diagonal principal de e são os uns e zeros da superdiagonal de . O sistema (9) normalmente é de resolução mais fácil que (5). Podemos então solucionar (9) para , obtendo . Substituímos então essa solução por na penúltima equação em (9) e resolvemos para . Continuando dessa forma resolvemos (9) da última para a primeira equação, resolvendo o sistema inteiro para . A solução é obtida então usando (8).[48]
Anton, Howard (1987), Elementary Linear Algebra, ISBN 0-471-84819-0 5th ed. , New York: Wiley
Axler, Sheldon (1997). Linear Algebra Done Right 2nd ed. [S.l.]: Springer. ISBN 978-0-387-98258-8
Beauregard, Raymond A.; Fraleigh, John B. (1973), A First Course In Linear Algebra: with Optional Introduction to Groups, Rings, and Fields, ISBN 0-395-14017-X, Boston: Houghton Mifflin Co.
Bronson, Richard (1970), Matrix Methods: An Introduction, New York: Academic Press, LCCN 70097490
Burden, Richard L.; Faires, J. Douglas (1993), Numerical Analysis, ISBN 0-534-93219-3 5th ed. , Boston: Prindle, Weber and Schmidt
Cullen, Charles G. (1966), Matrices and Linear Transformations, Reading: Addison-Wesley, LCCN 66021267
Franklin, Joel N. (1968), Matrix Theory, Englewood Cliffs: Prentice-Hall, LCCN 68016345
Golub, Gene H.; Van Loan, Charles F. (1996), Matrix Computations, ISBN 0-8018-5414-8 3rd ed. , Baltimore: Johns Hopkins University Press
Harper, Charlie (1976), Introduction to Mathematical Physics, ISBN 0-13-487538-9, New Jersey: Prentice-Hall
Herstein, I. N. (1964), Topics In Algebra, ISBN 978-1114541016, Waltham: Blaisdell Publishing Company
Kreyszig, Erwin (1972), Advanced Engineering Mathematics, ISBN 0-471-50728-8 3rd ed. , New York: Wiley
Nering, Evar D. (1970), Linear Algebra and Matrix Theory 2nd ed. , New York: Wiley, LCCN 76091646






































































 Ver artigo principal: Base canônica
Ver artigo principal: Base canônica