等価回路

抵抗 とコンデンサ を並列に接続した場合のインピーダンス (a)と、抵抗 とコンデンサ を並列に接続した場合のインピーダンス (b)は、







とすることで等価になる[注釈 1][1]。

電気系と機械系の要素では、電圧 と力 、電流 と速度 、インダクタンス と質量 、静電容量 とコンプライアンス 、抵抗 と機械抵抗 がそれぞれ対応関係にあり、上図の構成では同形式の方程式が立てられる。











等価回路(とうかかいろ、Equivalent circuit)とは、 対象となる電気・電子回路に対して、電圧・電流・周波数特性などの関係が等しくなるような構成をとる別の回路網[2][3]。単独の部品における理想的な特性に対して周波数特性などを考慮し詳細な回路構成としたものも等価回路という[4]。また、これら回路系以外の系(機械・磁気・熱・音響・生体など)の対象が持つ特性が示す方程式と同等の特性になるように置き換えた電気回路網のこと[2][3]。 一般に、等価回路に置き換えることは、対象となる系の簡略化を目的とすることが多く、特性の解析や、設計のしやすさの向上を図ることができる[5]。
概要
電気回路において、電源(電圧源・電流源)、電気抵抗、インダクタンス、静電容量を組み合わせた回路網では、定常特性、過渡特性、周波数特性などを、単純な計算式や微分方程式によって表すことができる。これらの式が同じになる回路網同士は電気回路として等価であることを示している。この場合、元の回路網と別の回路網は等価回路である、という。
実際には、等価回路として適用できる範囲(使用する周波数帯域などにおける電気的特性)が限定される場合があるため、必要ならば等価回路内の素子や接続構成を変更しなければならない。また、個別部品が理想的な特性のみを持つのではなく何らかの周波数特性や電流特性などを有する場合は、付随する要素を取り込んで実際の特性に合わせることも行われる。(#受動素子)
能動素子を含む電子回路においては、能動素子そのものの特性を電圧源や電流源を含む等価回路として置き換え、周辺回路と共に全体の等価回路を構成することが行われる。(#能動素子)
また一般に、物理的なシステムは適切な条件下では入出力間の関係は微分方程式で表すことができる。このような物理的に異なるシステムが同じ形の微分方程式で表されることを相似であるといい[6]、結果的に、それぞれのシステムを上記のような電気系回路の対応(等価回路)に置き換えが可能なことを示している[7]。
例えば、機械工学においては、力、速度、機械抵抗、質量、コンプライアンス[注釈 2]などが運動方程式で表される。これは電気回路における電圧、電流、電気抵抗、インダクタンス、静電容量などに対応している[8]。したがって、これらの構成要素を電気回路の回路網の部品に置き換えることができる[9]。つまり、機械素子の構成を電気回路に置き換えて方程式をたて、それを解くことにより機械系の振動特性や挙動を解析することができる。
電気回路の電流 は時間あたりの電荷 の移動量、機械系では物体の速度 は時間あたりの変位量 であることから、それぞれ、外部から与える電圧を、外力をとすれば、電気系、機械系の負荷との関係は、


- 電気系(電気抵抗 、インダクタンス 、静電容量 )

- 機械系(機械抵抗 、質量 、コンプライアンス )

となり同じ形式の方程式で表され、それぞれの項の係数は電気系、機械系で対応している()[9][10]。これは、同じ形式の方程式で表現できる挙動が電気回路として表現できることも示している(図2 参照)。(#機械工学)

伝熱系においては、発熱源、熱抵抗、熱容量を、電流源、電気抵抗、静電容量に置き換えることができる。(#伝熱工学)
さらには、直接的な素子対応とは見なされない生体においても、生体のインピーダンスモデルを作成したり、心臓の拍動をモデル化するなどの適用がなされている。(#生体)
なお、電気系以外の系を電気回路で表現したものを「機械回路」「音響回路」といった「××回路」と呼ぶことがある[11]。
等価回路を使う利点
等価回路は電気回路自身だけでなく、他の系を電気回路網に置き換えることが可能であり同等の特性を模擬することが可能である。よって、機械的振動の解析や熱解析に回路解析手法を適用することができる。これは、回路シミュレーターを使った解析や設計も可能であることを示している[5][12][注釈 3]。
スピーカなど電気回路の要素と音響機械要素が組み合わされる機器では、音響機械要素部を電気回路に置き換えて1つの電気回路として扱うことで、インピーダンス特性の解析を統一的に行うことが出来るようになる[13][14]。
なお、各系の個別素子が1つの電気系素子と対応するとき、複数素子の接続状態は電気回路における直列接続・並列接続として表すことが出来ることも示している[15][16][17]。
電気系の等価回路
電気回路
電気回路では、オームの法則をはじめとして、キルヒホッフの法則、テブナンの定理、ノートンの定理などの交流回路理論の基礎的な事項を用いて、複雑な構成を有する回路を簡略化し等価回路を作成することができる。
例えば、オームの法則、キルヒホッフの法則を適用すれば、インピーダンス素子を直列接続や並列接続した構成の回路を最小限の素子に置き換えることができる。
テブナンの定理、ノートンの定理を用いることにより、電圧源、電流源となる電源、インピーダンスを含む回路網において、任意の2点間に対する等価回路を生成することができる。
直列接続回路と並列接続回路
電気抵抗、インダクタンス、静電容量などの受動素子(インピーダンス素子)を直列、あるいは、並列に接続した回路の場合、オームの法則、キルヒホッフの法則により、素子の接続構成を簡略化することが可能である。 (以下、インピーダンス素子を 、電源電圧を 、電流を 、素子間電圧を とする)





- 直列接続回路
図.3 (a-1)は、2つの素子、、 を直列に接続にした例である。


このとき、電流 の経路は1つのみであり、各素子の両端電圧は 、 である。ここでは、



になる[注釈 4]。 であるから、電源 からみたインピーダンス は、


なので、当初の結果より、

が得られる。 つまり、この と を直列接続した回路の合成インピーダンス は、


であり、図.3 (a-2)の等価回路に置き換えられる。
この結果を拡張すれば、インピーダンス素子を直列に N 個接続した場合の合成インピーダンス は、

で求められる[18]。
- 並列接続回路
図.3 (b-1)は、2つの素子、、 を並列に接続にした例である。
このとき、電流 の経路は各素子に分かれ 、 になるが、各素子の両端電圧は電源電圧と同一の である。ここで、各電流は、




であるから、

になる[注釈 5]。電源 の電流 は、合成したインピーダンスを とすると、


であり、 から、

となり、

である。 で整理すると、

となって、図.3 (b-2)の等価回路に置き換えられる。
この結果を拡張すれば、インピーダンス素子を並列に N 個接続した場合の合成インピーダンス は、

で求められる[19]。
- 直列・並列接続混合回路
直列接続と並列接続が混合した回路では、上記の直列接続回路・並列接続回路による簡略化を用いればよい[20]。
図3. (c-1)は、3つの素子、、 を直列並列接続した例である。

まず、並列接続されている 、 を合成インピーダンス に置き換える。このとき は、

であり、上述の通り、

となって、図.3 (c-2)に変換される。
次に、求めた を用いて との直列接続の合成インピーダンス を求めればよい。

となるので、図.3 (c-3)の等価回路に置き換えられる。
なお、上記いずれの場合においても、各インピーダンス素子が電気抵抗 、インダクタンス 、静電容量 であれば、それぞれ、、、として計算すればよい。


テブナンの定理

電源や回路素子を含む回路網(図.4 (a))中の任意の2点間に現れる電位差が (図.4 (b-1))、電圧源を短絡、電流源を開放したときのインピーダンスが (図.4 (b-2))のとき、この2点間にさらにインピーダンス を接続したときに流れる電流 は、



である(図.4 (b-3))。
したがって、この2点間から見た回路網の等価回路は、電源電圧 、出力インピーダンス の直列回路として表される[21][22][23]。
ノートンの定理
電源や回路素子を含む回路網(図.4 (a))中の任意の2点間に流れる電流が (図.4 (c-1))、電圧源を短絡、電流源を開放したときのアドミタンスが (図.4 (c-2))のとき、この2点間にアドミタンス を接続したときに発生する電圧 は、




である(図.4 (c-3))。
したがって、この2点間から見た回路網の等価回路は、電流源 と、コンダクタンス の並列回路として表される[21][24][25]。
受動素子
抵抗器、インダクタ、コンデンサなどの受動素子は、通常は適用する回路の周波数領域では理想的な電気抵抗素子やリアクタンス素子と見なされるが、より高い周波数領域では素子そのものの構造(パッケージ)や配線状況に由来するインピーダンスの変化が生じるので注意を要する[26]。
抵抗
理想的な抵抗器は電気抵抗成分 しか持たない(図.5 (a))。
しかし、実素子としては、抵抗素子自体や素子に接続するリード線部が有するインダクタンス 、端子間に存在する静電容量 の影響を受けるので、これらの要素を組み合わせたものが等価回路になる(図.5 (b)、(c))[注釈 6]。このため用いる周波数によってインピーダンスの変化する素子として振る舞う[27][28]。

インダクタ

理想的なインダクタはインダクタンス のみを持つ(図.6 (a))。
しかし、実素子としては、巻き線が有する抵抗 、巻き線間に存在する静電容量 と絶縁抵抗 の影響を受けるので、これらの要素を組み合わせたものが等価回路になる(図.6 (b))。このため高周波領域では素子自体が共振点を持ったり、インダクタとしての役割を失い静電容量成分が主となる場合がある。
例えば、図.6 (b)の等価回路では、 となる並列共振周波数 付近で最もインピーダンスが大きくなるが、より高い周波数領域では による特性が支配的になるためインピーダンスは小さくなる[29]。 また、インダクタに流れる電流が許容値を超えるとインダクタンスが低下する場合もあるので[注釈 7]、より適切なモデリングを行うことがある[30][31]。


コンデンサ

理想的なコンデンサは静電容量 のみを持つ(図.7 (a))。
しかし、実素子としては、端子部が有する抵抗 (ESR/等価直列抵抗)やインダクタンス (ESL/等価直列インダクタンス)があるとみなせる(図.7 (b))[注釈 8]。またさらに端子間の絶縁抵抗 や静電容量 を考慮することがある(図.7 (c))。このため高周波領域では素子自体が共振点を持ったり、コンデンサとしての役割を失いインダクタンス成分が主となる場合がある[32][33][34]。
例えば、図.7 (b)の等価回路では、 となる並列共振周波数 付近で最もインピーダンスが小さくなるが、より高い周波数領域では による特性が支配的になるためインピーダンスは大きくなる[35][33][34][36]。

水晶振動子

水晶振動子は水晶の結晶に生じる圧電現象を利用した素子で、その弾性的性質は質量、機械コンプライアンスで決まる固有振動数を持つ。この固有振動数と同じ周波数の電界を加えると共振することを利用し、周波数精度の高い発振回路を構成する部品として用いられる[37]。
等価回路としては、水晶の質量がインダクタンス 、機械コンプライアンスが静電容量 、機械損失が抵抗値 に相当する直列回路に電極間容量 が並列に接続された構成(図.8 (b))になる。等価抵抗 を無視した場合のリアクタンス は、

、


である[38]。
この回路は直列共振周波数 と並列共振周波数 をもち、




である。通常は、なので と の間隔は非常に狭くなり、この区間でのみ誘導性リアクタンスとなるので、発振回路ではインダクタの代わりとして用いられる[39][38]。

能動素子
バイポーラトランジスタ(BJT)や電界効果トランジスタ(FET)などの能動素子は整流作用や増幅作用などの特性を持つことから、抵抗器やインダクタ、コンデンサなどの受動部品の組み合わせだけでなく、電圧源や電流源を含めた回路網として表現することが多い。また、適用する信号の種類により回路構成の使い分けが行われる。
能動部品を用いて増幅回路を構成する場合は、入力2端子・出力2端子の二端子対回路に対してT型等価回路や、hパラメータ、Yパラメータを適用した等価回路として表すことが基本となる。この場合、入力側と出力側の1端子ずつを共通端子(接地端子)として設定する。トランジスタではエミッタ・コレクタ・ベース端子がありそれぞれエミッタ接地・コレクタ接地・ベース接地となり、FETではソース・ドレイン・ゲート端子がありそれぞれソース接地・ドレイン接地・ゲート接地と呼ぶ[40]。
ダイオード

ダイオードは p 型半導体と n 型半導体を接合した2端子の部品であり、それぞれアノード(A)端子、カソード(K)端子と呼ぶ。カソードに対してアノード端子が高電位[注釈 9]になると電流が流れ、逆の電圧[注釈 10]になると電流が流れないという整流作用を持つ。理想的な特性では、順方向電圧の場合は導通状態になり、逆方向電圧の場合は電流が遮断される(理想ダイオード)[41]。
しかし、実際の素子ではこの電圧と電流の関係は非線形であり、さらに pn 接合の拡散電位のために順方向電圧は所定の電圧以上でなければ電流が流れ始めない(シリコンで約0.5 - 0.7V、ゲルマニウムで約0.2 - 0.4V[42])。
これらを考慮した折れ線近似等価回路(図.9 (b))では、理想ダイオード 、動作抵抗 [注釈 11]、拡散電位電圧を直列接続した構成となる。これは、拡散電位を超えた電圧が印加されると、動作抵抗 Rにより電流が1次関数的に決まることを表している[41]。



高周波動作を考慮する場合(図.9 (c))、理想ダイオードに並列に pn 接合の空乏層が持つ接合容量 、ダイオードの広がり抵抗 、素子に寄生する直列インダクタンス が直列に接続された構成になる[41]。

なお、いずれの等価回路においても、逆方向電圧印加時の逆方向電流は考慮されない[注釈 12]。
バイポーラトランジスタ
バイポーラトランジスタはp型半導体、n型半導体をそれぞれ、pnp型ではp-n-p、npn型ではn-p-nの順番で接合したものである。両端の端子をE(エミッタ)、C(コレクタ)とし、中央部をB(ベース)の各端子として用いる。増幅回路に適用する場合は、いずれかの端子を入出力の共通端子として使用する。直流に対する増幅回路では直流等価回路、交流信号に対する増幅回路では小信号等価回路、さらには高周波領域で使用する場合は高周波等価回路を適用する。
直流等価回路
-
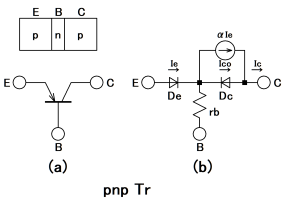 図.10 pnpトランジスタの直流等価回路
図.10 pnpトランジスタの直流等価回路 -
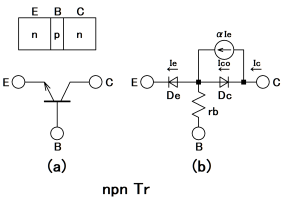 図.11 npnトランジスタの直流等価回路
図.11 npnトランジスタの直流等価回路


トランジスタの直流増幅に着目した等価回路は、pnpトランジスタは図.10、npnトランジスタは図.11 のようになる。
素子の構造上、E-B、B-C端子間に、用いる電流方向(バイアス)に対してそれぞれダイオードを順・逆方向に接続したものと同等であると考えられる。したがって、pnp型トランジスタ、npn型トランジスタでは異なる構成になる。コレクタ電流はエミッタ電流の 倍( はベース接地電流増幅率)の電流源が接続されているものと見なせる[43][44]。

小信号等価回路
小信号等価回路は、トランジスタを適切なバイアス状態にした場合の交流小信号に対する振る舞いを近似するために用いられる。T型等価回路、hパラメータ(ハイブリッドパラメータ)を用いた回路があり、いずれの等価回路においても交流信号に対する動作であるので pnp型トランジスタ、npn型トランジスタによる区別は無い。
- T型等価回路
トランジスタの各端子に流れる電流を、ベース電流 、エミッタ電流 、コレクタ電流 とし、ベース広がり抵抗 、エミッタ拡散抵抗 、コレクタ抵抗 、ベース接地電流増幅率を、[注釈 13]とすると右図のようになる[45]。それぞれ、図.12 (a)はベース接地回路、(b)はエミッタ接地回路、(c)はコレクタ接地回路である。







- hパラメータによる等価回路
-
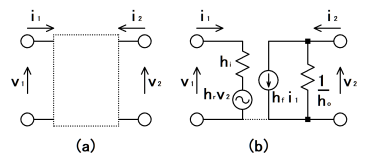 図.13 hパラメータによるトランジスタの等価回路
図.13 hパラメータによるトランジスタの等価回路

hパラメータによる等価回路は、4端子回路における入出力の電流電圧関係をそのまま示したものであり、等価回路の構成としては pnp/npn型による違いや接地方式による違いは無く統一的に扱うことが出来る。回路構成と各パラメータの関係は図.13 および下式の通りである[46]。

(入力インピーダンス)、(電圧帰還率)、(電流利得)、(出力アドミタンス)の各パラメータは以下の条件で設定される。




[Ω]、、、[S]




ただし、それぞれのパラメータは接地方式によって異なるので、以下の表の通り用いる添え字を変えて用いる。
| ベース接地 | エミッタ接地 | コレクタ接地 | |
|---|---|---|---|












FET
FETは S(ソース)、G(ゲート)、D(ドレイン)端子を持ち、G-S 間の電圧で、S-D 間の抵抗値を制御する素子と見なせる。各端子はバイポーラトランジスタのE(エミッタ)、B(ベース)、C(コレクタ)に相当する。ただし、バイポーラトランジスタとは異なり適切な直流等価回路は無く、直流特性に関しては静特性図を用いる[47]。
小信号等価回路

小信号等価回路において、G-S 間の電圧 の変化に対するドレイン電流 の変化を (相互コンダクタンス、あるいは、伝達コンダクタンス)、ドレイン電流 とドレイン-ソース間電圧 の比を (ドレイン抵抗)と呼ぶ。





[S]、[Ω]


であり、ドレイン端子に流れる信号電流には、

の基本式が成り立つ[注釈 14]。
また、ゲート電圧 に対するドレイン電圧 の変化を増幅率 と呼び下式で定義する。


これら相互コンダクタンス 、ドレイン抵抗 、増幅率 は FET の3定数といい、以下の関係が成立する[48][49]。

図.14 はそれぞれソース接地回路 (a)、ドレイン接地回路 (b)、ゲート接地回路 (c) において電圧源を用いた等価回路である。入力側信号電圧を 、出力側電圧を 、入力電流を 、出力電流を とする。ここで、FETの構造およびバイアス状態から、ゲート電流 はほとんど流れない。このためバイポーラトランジスタで用いる h パラメータは用いられない[注釈 15]。





ソース接地回路(図.14 (a))では,入力電圧 がゲート電圧 、出力電圧 はドレイン電圧 、出力電流 はドレイン電流 になる。このとき、 を変形すると、




となり、さらに を用いて変形すると、

が得られ、電圧源を用いた等価回路に変形できる[51][注釈 16]。
ドレイン接地回路(図.14 (b))では、ゲート電圧 、出力電圧 、ドレイン電流 になる。 についての基本式をこれらの関係を適用すると、




となり、 について変形し、 を用いれば、

となり、電圧源等価回路が得られる[52]。
ゲート接地回路(図.14 (c))では、ゲート電圧 、出力電圧 、ドレイン電流 になる。 についての基本式をこれらの関係を適用すると、




となり、 について変形し、 を用いれば、

となり、電圧源等価回路が得られる[53]。
オペアンプ

オペアンプ(演算増幅器)は、図.15 (a)の回路記号で表され、反転入力と非反転入力の2つの入力端子を持ち、それぞれの入力電圧を 、 、電圧増幅率を としたとき、理想的には出力端子に となる電圧を出力する回路である[54][55]。




また、正負電源を供給する端子( と )がある。


現実的な回路素子としては図.15 (b)のように、
- 入力インピーダンス
- 出力インピーダンス
- 入力オフセット電圧



が存在する。
また、入力電圧(、)の範囲や、出力電圧 は内部回路の構成により電源電圧範囲( ・ )よりも狭くなる。ただし、これらの入力・出力電圧を電源電圧範囲いっぱいになるようにした製品もある[56]。

理想的な状態では、
- 入力インピーダンス は無限大(入力端子に電流は流れない)
- 電圧増幅率 は無限大
- 出力インピーダンス はゼロ
- 周波数特性が平坦(帯域が無限大)
- 入力オフセット電圧 がゼロ
- 温度ドリフト[注釈 17]がゼロ
このような(理想的な)条件の下でオペアンプを用いた回路における付随する素子[注釈 18]の定数を決定することが多い。ただし、高精度な性能が要求される場合は、調整手段を設けたり、用途別のオペアンプを選択する必要がある[57][58]。
電気機器
変圧器
- 理想変圧器
理想的な変圧器では、巻線自体の損失をゼロ、磁気回路の損失をゼロ(磁気特性が線形・漏れ磁束無し)と見なす。 1次巻線と2次巻線の巻回数がそれぞれ 、のとき、巻数比 は となる[注釈 19]。




図.16 (b-1)のように、1次側に交流電源 を接続し、2次側を開放した場合の関係は、2次側の出力電圧を とすれば、

また、図.16 (b-2)のように、2次側を短絡した場合の関係は、1次側の電流を 、2次側の電流を とすれば、

また、自己インダクタンスがそれぞれ と である回路が相互インダクタンス で磁気結合していると見なした場合の理想変圧器では、相互インダクタンス を共通とする回路網に変形できる。



図.16 (c-1)のような入出力電流電圧関係があるとき、4端子のうちの2端子を同一電位として考えるT型回路とすれば、左側()側からみて と のインダクタンス直列回路、右()側からみて と のインダクタンス直列回路であり、 を共通のインダクタンスとしている回路(図.16 (c-2))と見なせる[62]。


- 実際の変圧器
理想変圧器とは異なり、実際の変圧器では鉄芯の磁気特性(ヒステリシス特性や励磁電流の必要性)の影響により、交番励磁するための電力(鉄損)が生じる。励磁するための電流は歪み波電流であるが、等価的には実効値が等しい正弦波電流 として扱う。励磁電流の負荷は有効電力と無効電力を分ける励磁コンダクタンス と励磁サセプタンス で構成される励磁アドミタンス として考える(図.17 (a))[63][64]。この励磁アドミタンスにより、2次側が無負荷であっても電流が流れる。


さらに、1次側、2次側巻線には電気抵抗が存在するとともに、各巻線によって発生する磁束すべてが他方の巻線に鎖交するするのではなく一部は空気中を通る漏れ磁束になることから、漏れリアクタンスとよばれる成分が生じる。このため、それぞれの巻線の電気抵抗を 、、漏れリアクタンスを 、 とおき、理想変圧器を用いて生成した等価回路は図.17 (b)のようになる[65][66]。 1次電流 は励磁電流 と理想変圧器の1次電流 になるので、このときの理想変圧器の1次側電圧を とすれば、2次側電圧 は巻数比 できまり となる。同様に、1次側電流 と2次側電流 の関係は、 で表される[65][66]。









ここで、図.17 (c)において、2次側電圧 を 倍して1次側の電圧 と同じにし、同時に2次側電流 を 倍しても2次側の負荷の関係は同じになるので、右図(b)の1次側には影響しない。この関係を満たすために2次側の負荷インピーダンスをそれぞれ 倍する[注釈 22]。この回路変形を行うことで理想変圧器を省略することができ、図.17 (d)の等価回路となる。これを2次側を1次側に変換した変圧器等価回路という[67][68]。


さらに、通常使用される変圧器においては、各巻線の電気抵抗()や漏れリアクタンス()は小さく、励磁電流 も小さくなるよう作られているために電圧降下の影響も少なくなるので、励磁アドミタンスの位置を図.17 (e)のように1次側に変更しても実用上問題ない。これを変圧器の簡易等価回路とよぶ[67][68]。


電動機
- 誘導電動機

誘導電動機は固定子巻線で生成する回転磁界により、回転子巻線に電流を発生させることでトルクを生じる。固定子を1次巻線、回転子を2次巻線とすれば動作は変圧器と同様の解析ができる。ただし、変圧器とは異なり、1次、2次の相数の違い、閉磁路ではないこと、2次側負荷が機械出力であること、回転子のすべり()[注釈 23]、などを考慮する必要がある。

まず、固定子巻線1相に対して等価回路を考える。
実際の変圧器と同様に、励磁電流を流すための励磁アドミタンス が存在する(図.18 (a))。ただし、この誘導アドミタンスに流れる電流は変圧器に比べて大きい。1次側2次側それぞれに巻線の電気抵抗 、、漏れリアクタンスを 、 があることも同様である。
2次側の回転子が停止している状態(s=1)では、機械出力がゼロであることと同等であるので、変圧器の2次側インピーダンスは短絡されているものと見なせ、図.18 (b)の等価回路として示される。
回転子がすべり で回転しているとき、2次側の負荷抵抗 は機械出力と等しいと見なせると考えれば、この負荷抵抗 を とおくことで、図.18 (c)の等価回路を得る。

実際の誘導電動機では、1次巻線と2次巻線の巻数や相数は異なるため、次の換算を用いる。
1次および2次の巻数比 は、それぞれの巻数を 、、巻数係数を 、 とすれば、 となり、それぞれの相数を 、 とすれば、2次側の抵抗とリアクタンスは、、 となり、このときの負荷抵抗 は となるので、これを考慮して変圧器の1次側変換等価回路と同様の変換を行えば、図.18 (d)の等価回路になる[71][72]。









さらに、誤差の影響は大きくなるが[注釈 24]各部の計算簡略化を目的とし、励磁アドミタンス を1次側抵抗とリアクタンスよりも電源側に配置した図.18 (e)の簡易等価回路を用いることもある[73][74]。
- ブラシ付き直流モータ

ブラシ付き直流モータは、N極とS極のペアの永久磁石で構成するステータと、コイルを巻き電磁石となるように構成するロータ(回転子)からなる。ロータは回転する毎に電磁石の極性が逆になるように電極(ブラシ)が配される。
電気部品としては1つの記号として表され、直流電源 をモータに接続すると、電流 が流れてロータが回転する(図.19 (a))。


ロータ電磁石のための巻線はインダクタンス と抵抗成分 を持つ。また、ロータの回転数が増す毎に発電機としての作用を生じ、これが回路の逆起電力として見なされる。したがって、これらの要素を考慮した等価回路構成になる(図.19 (b))[75][76]。


このとき、各要素に発生する電圧は、


であり、モータの発電係数を (Vs/rad)、回転速度を (rad/s)とすれば、



で表される。なお、定常動作時は、回路電流 は直流安定電流となるので、巻線インダクタンス による電圧降下はゼロになり無視できる[75][76]。
電気系要素と各系要素との対応と等価回路
機械振動系、音響系を電気回路として表す方法は、アーサー・エドウィン・ケネリーによって考案され、この手法は各分野に拡がった[77]。
電気回路素子と機械系、音響系、熱系、磁気系では、以下のようにパラメータが対応している。ただし、表中に示すとおり物理単位は対応しないので、異なる系を直接的に連結させることはできない。なお、本項では表記の混同を避けるため、電気系の電圧を 、運動の速度を とする。

これらの対応関係を用いて、電気回路的動作解析・設計手法を各系に取り込むことができる。
| 電気系 | 直線運動系[79][80][81] | 回転運動系[82][83] | 音響系[84][85] | 伝熱系[86][87] | 磁気系[88][89] | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 電圧 | (V) | 力 | (N) | トルク | (Nm) | 音圧 | (N/m2) | 温度 | (K) | 起磁力 | (A) |
| 電流 | (A) | 速度 | (m/s) | 角速度 | (rad/s) | 体積速度 | (m3/s) | 熱流量 | (W) | 磁束 | (Wb) |
| 電荷 | (C) | 変位 | (m) | 回転角 | (rad) | イナータンス | (kg/m4) | - | - | - | - |
| インダクタンス | (H) | 質量 | (kg) | 慣性モーメント | (kgm2) | 容積 | (m3) | - | - | - | - |
| 静電容量 | (F) | コンプライアンス | (m/N) | 回転コンプライアンス | (rad/Nm) | 音響コンプライアンス | (m5/N) | 熱容量 | (J/K) | - | - |
| 電気抵抗 | (Ω) | 機械抵抗 | (Ns/m) | 回転機械抵抗 | (Nms/rad) | 音響抵抗 | (Ns/m5) | 熱抵抗 | (K/W) | 磁気抵抗 | (A/Wb) |

















機械工学
直線運動系
- 機械抵抗

摩擦による抵抗や粘性のある流体中を速度 で動かすために必要な力 は、機械抵抗成分を とすれば、

で表される(図.20 (a-1)(a-2))。
電気回路では、電流を 、電圧を 、抵抗を とすれば、

で表される(図.20 (b-1)(b-2))。
これらの式の対応から、機械抵抗 と抵抗 、力 と電圧 、速度 と電流 がそれぞれ対応していると考えることができ、図.20 (a-1)の状態を右図(c)に示す電気回路に変換することが可能になる[90][91][92]。
- 質量

質量 の物体に力 を加え、変位 が生じたとき、速度を とすれば、

で表される(図.21 (a-1)(a-2))。
電気回路では、インダクタンス に電圧 を印加したとき、電流を とすれば、

で表される(図.21 (b-1)(b-2))。
これらの式の対応から、質量 とインダクタンス 、力 と電圧 、速度 と電流 がそれぞれ対応していると考えることができ、図21. (a-1)の状態を図.21 (c)に示す電気回路に変換することが可能になる[93][94][95]。
- コンプライアンス

ばねの一端を固定し、他端に力 を加えたとき、ばねのコンプライアンスを 、変位 は、
なので


で表される。速度 は、

となるので、力 は、

である(図.22 (a-1)(a-2))。
電気回路では、静電容量 に電圧 を印加したとき、電荷を 、電流を とすれば、
なので


であり、 であるから、電圧 は、


で表される(図.22 (b-1)(b-2))。
これらの式の対応から、コンプライアンス と静電容量 、力 と電圧 、速度 と電流 、変位 と電荷 がそれぞれ対応していると考えることができ、図.22 (a-1)の状態を図.22 (c)に示す電気回路に変換することが可能になる[96][97][98]。
回転運動系
- 回転抵抗

回転体を摩擦抵抗や粘性のある流体中を角速度 で動かすために必要な回転力(トルク) は、回転機械抵抗成分を とすれば、

で表される(図.23 (a-1)(a-2))。
電気回路では、電流を 、電圧を 、抵抗を とすれば、
で表される(図.23 (b-1)(b-2))。
これらの式の対応から、回転機械抵抗 と抵抗 、トルク と電圧 、角速度 と電流 がそれぞれ対応していると考えることができ、図.23 (a-1)の状態を図.23 (c)に示す電気回路に変換することが可能になる[99][100]。
- 慣性モーメント

慣性モーメント を持つ回転体の軸の周りに回転力(トルク) を与え、角速度 が変化したとき、

で表される(図.24 (a-1)(a-2))。 電気回路では、インダクタンス に電圧 を印加したとき、電流を とすれば、
で表される(図.24 (b-1)(b-2))。
これらの式の対応から、慣性モーメント とインダクタンス 、トルク と電圧 、角速度 と電流 がそれぞれ対応していると考えることができ、図.24 (a-1)の状態を図.24 (c)に示す電気回路に変換することが可能になる[79][101]。
- 捻りバネ

ばねの一端を固定し、他端に回転力(トルク) を加えたとき、ばねの回転コンプライアンスを 、ねじれ角 は、
なので


で表される。角速度 は、

となるので、トルク は、

となる(図.25 (a-1)(a-2))。
電気回路では、静電容量 に電圧 を印加したとき、電荷を 、電流を とすれば、
なので
であり、 であるから、電圧 は、
で表される(図.25 (b-1)(b-2))。
これらの式の対応から、回転コンプライアンス と静電容量 、トルク と電圧 、角速度 と電流 、回転角 と電荷 がそれぞれ対応していると考えることができ、図.25 (a-1)の状態を図.25 (c)に示す電気回路に変換することが可能になる[102][103]。
音響工学

- 音響抵抗
媒質が流動する通路中に、動きを妨げるように繊維を詰めたり隙間を設けたりすると粘性のために媒質の動きは妨げられる。
媒質を体積速度 で運動させるために必要な圧力を とすると、下式が成り立つ。


ここで、 を音響抵抗とよぶ(図.26 (a-1)(a-2))。 電気回路では、電流を 、電圧を 、抵抗を とすれば、
で表される(図.26 (b-1)(b-2))。
これらの式の対応から、音響抵抗 と抵抗 、圧力 と電圧 、体積速度 と電流 がそれぞれ対応していると考えることができ、図.26 (a-1)の状態を図.26 (c)に示す電気回路に変換することが可能になる[104][105][106]。
- イナータンス

寸法が波長に比べて小さく、両端が開放され、その空間内の媒質が体積一定のまま動く状態にあるとき、一方の断面面積 に単位面積あたりに圧力 を加えるとき、媒質の質量を 、全体の速度を とすれば、断面に加わる力は となるので、




断面 を横切る体積速度を とすれば なので、上式を変形すると、


ここで、イナータンス を と定義すれば、


で表される(図.27 (a-1)(a-2))。 電気回路では、インダクタンス に電圧 を印加したとき、電流を とすれば、
で表される(図.27 (b-1)(b-2))。
これらの式の対応から、イナータンス とインダクタンス 、圧力 と電圧 、体積速度 と電流 がそれぞれ対応していると考えることができ、図.27 (a-1)の状態を図.27 (c)に示す電気回路に変換することが可能になる[107][108][109]。
- 音響コンプライアンス(音響容量)

波長より寸法が小さい容積 の空洞の口に、圧力 を加えたとき、中の媒質が圧縮されて容積が だけ減少したとする。空洞内の媒質の静止圧を 、静止密度を 、媒質の定圧比熱と定積比熱との比を 、音速を として、断熱変化であるとすれば、以下の近似式が成り立つ。







この式を変形すれば、

ここで、音響コンプライアンス(音響容量)を と定義すれば、


となる。口部分を通過する媒質の体積速度 は、

である。したがって、圧力 は、

となる(図.28 (a-1)(a-2))。
電気回路では、静電容量 に電圧 を印加したとき、電荷を 、電流を とすれば、
なので
であり、 であるから、電圧 は、
で表される(図.28 (b-1)(b-2))。
これらの式の対応から、音響コンプライアンス と静電容量 、圧力 と電圧 、体積速度 と電流 、容積 と電荷 がそれぞれ対応していると考えることができ、図.28 (a-1)の状態を図.28 (c)に示す電気回路に変換することが可能になる[110][111][112]。
伝熱工学

伝熱工学における等価回路の適用は、熱流量 と電流 、熱抵抗 と電気抵抗 、熱容量 と静電容量 を対応させることができる[113]。
熱抵抗
2点の温度が と であり、その間の熱流量が であるとき、熱抵抗 は、




で定義される。熱抵抗は熱伝達率の逆数であり、熱の伝わりにくさを表す[113][114]。
これは、電気回路における2点の電位 、 間 に流れる電流 と電気抵抗 の関係、


に対応している(図.29)。
熱容量
伝熱において、定常状態では熱抵抗のみを考慮すれば良いが、発熱源の発熱量が変化するなどの過渡的な状態では対象となる物質の熱容量によって温度に時間的な変化が生じる[113]。
熱容量 は、熱量 を与えたときに上昇する温度を とすれば、



である[115]。
これは、電気回路における静電容量 と、電荷 、電位差 の関係

と同形式である。ここで、電荷 と熱量 が対応し[116]、それぞれを時間積分したものが、電流 、熱流量 に対応する。
熱回路網

熱回路網とは、温度、熱源、熱抵抗、熱容量の関係を回路図としてモデル化したものである[117]。電気回路の場合と同様の計算で解くことが出来る。
単純な例として、2点の温度( - )間に異なる2種の熱抵抗 、 の物質があることを想定する。このとき、2点間に対して直列に層をなしている場合は各熱抵抗を加算したものが合成熱抵抗となり、 となる(図.30 (a))。また、2点間に対して並列に層をなしている場合は、 となる(図.30 (b))。したがって、 である。





いずれも、電気回路における抵抗の直列接続、並列接続の場合と同様に計算できる[118]。
熱容量が無視できない過渡状態では、熱抵抗と熱容量を回路として用い、過渡熱インピーダンスと呼ぶ[119]。過渡熱インピーダンスのモデルとしては、ラダー型のCauerモデル(図.31 (a))[注釈 26]、チェーン型のFosterモデル(図.31 (b))がある[120][119]。ただし、熱抵抗、熱容量のいずれも材質や形状などが理想状態からずれることが多く、モデリングの合わせ込みが必要となる[121][注釈 27]。
磁気回路

例えば、電磁石のように鉄芯にコイルを巻いて電流を流すことで磁束を発生させることを考えたとき、磁束の通る磁路を磁気回路という(図.32 (a))[123][124]。
磁束 を発生させる力を起磁力 とよび、コイルの巻数 とコイルに流す電流 から


となる。また、磁路の平均長を 、断面積を とし、透磁率を としたとき、磁気抵抗(リラクタンス) は、


である[注釈 28]。磁束 は起磁力 に比例し、磁気抵抗 に反比例するので、これらのの関係は、

となり、図.32 (b)のような回路に置き換えることができる。また、この式は、電気回路における電流 、電圧 、電気抵抗 との関係(オームの法則)

と同形式(図.32 (c))であり という対応になる[125][126]ので、磁気回路におけるオームの法則とも呼ばれる。

また、磁気回路におけるオームの法則と同様に、磁気回路におけるキルヒホッフの法則も成立する[125][127]。
ただし、電気回路の場合は電気抵抗は線形素子として扱えるが、磁気回路の場合は透磁率が磁束の大きさによって変化するため非線形となるので注意を要する[125][128]。
生体
生体のインピーダンスを測定ないしは推定することにより、心循環系、呼吸系、体組成などの状態を推定したり診断情報として利用することが行われる[129]。
生体インピーダンス

体組織の解析や生体運動の解析を行う上で、人体を抵抗成分や静電容量成分などから構成される生体インピーダンスとして解析する手法がある[129]。
簡単な例では、生体組織が細胞と細胞外液から構成され、細胞が細胞膜と細胞内液から構成されることから、細胞膜が持つ静電容量成分、細胞内液・細胞外液が持つ抵抗成分の回路網として表すことができる(図.33 (a)[130][131]、(b)[132])。この等価回路を用いて体組成計における体脂肪率等の計測が行われる[131]。
なお、図.33 の2つの等価回路では、それぞれの素子の抵抗値、静電容量を適切に設定することで特性は一致する[注釈 29]。
ウィンドケッセルモデル
-
 図.34 ウィンドケッセルモデル
図.34 ウィンドケッセルモデル
心臓(Heart)がポンプ(Pump)、弾性動脈(Elastic arteries)が空気室(Windkessel)に相当する -
 図.35 ウィンドケッセルモデルの等価回路
図.35 ウィンドケッセルモデルの等価回路


循環器医学におけるウィンドケッセルモデルは、心臓の拍動による動脈血の血圧波形を説明するために導入されたモデルである。大動脈を収縮する槽、末梢血管を一定の流路抵抗を持つとみなすことを基本としている[133][134]。
最も簡単なモデルでは、動脈のコンプライアンスと末梢血管の抵抗を模擬し、2要素モデルとよばれる(図.35 (a))。心臓の拍動圧を 、血液の流量を とする。

2要素モデルに大動脈の流路抵抗 を加味したモデルを、3要素モデルという(図.35 (b))。

さらに、血流の慣性力 を加味すると、4要素モデルになる(図.35 (c))。
ホジキン-ハクスリー・モデル

アラン・ロイド・ホジキンとアンドリュー・フィールディング・ハクスリーは、イカの巨大軸索神経の活動電位伝搬の研究により、神経繊維膜の電気的等価回路(ホジキン-ハクスリー・モデル(英語版))を提唱した。これは、神経の活動電位伝搬はナトリウムイオンとカリウムイオンが担っていることを明らかにしたものである[135][136][137][注釈 30]。
図.36 において、神経繊維膜の膜電位()と膜の外部から内部へ流れる電流()との関係は、膜の間に存在するイオンの平衡電位(ナトリウムイオン()、カリウムイオン()、その他塩化物等イオン())とそれぞれのイオンチャネルの抵抗(、、)、膜間の静電容量()で決まる。ここで、抵抗成分、は可変抵抗で表され、膜電位はこれらチャネル抵抗の変化によることで説明ができる [138][139]。







脚注
[脚注の使い方]
注釈
- ^ 抵抗 とコンデンサ を並列に接続した場合のインピーダンス は、
より、
となる。 抵抗 とコンデンサ を並列に接続した場合のインピーダンス は、
であるから、
とすれば、2つの回路は等価になる。 - ^ コンプライアンスはバネ定数の逆数。
- ^ 対象となる系を等価回路に置き換え、シミュレータの解析と系の実測とを比較し、より詳細な等価回路を作成することにも用いられる。
- ^ キルヒホッフの法則(電圧則)により各インピーダンスにかかる電圧の和は電圧源の電圧に等しく、各インピーダンスにかかる電圧はオームの法則により電流値により求められる。
- ^ キルヒホッフの法則(電流則)により各インピーダンスに流れる電流の総和は、電圧源から流れこむ電流に等しい。
- ^ 部品の構造などにより使い分けられる。
- ^ コア材を用いている場合には磁気飽和により急激にインダクタンスが低下する。
- ^ リード線を有するアキシャル部品やラジアル部品におけるリード線部やチップ部品における端子部に含まれる成分による。
- ^ 逆方向電圧、または、逆方向バイアスと呼ぶ。
- ^ 順方向電圧、または、順方向バイアスと呼ぶ。
- ^ 電流電圧特性(IV特性)におけるある一点のI、Vの組み合わせで決まる抵抗。 で求まる。交流抵抗または動抵抗とも。
- ^ 逆方向電圧が印加された場合の漏れ電流や降伏現象が近似できないということ。
- ^ となる。
- ^ 小信号の電流・電圧を表すので小文字を用いる。
- ^ ゲート電流 でなので、Yパラメータが適している[50]。ただし、Yパラメータからhパラメータや他の4端子パラメータへの相互変換は可能である。
- ^ 電圧源と電流源の双対性を用いて電流源を用いた等価回路にも変形できる。
- ^ 温度によって入力オフセット電圧 が変動すること。
- ^ 反転増幅器、非反転増幅器、差動入力増幅器、加算・減算回路、積分・微分回路、等を構成するための受動素子類。
- ^ 巻数比 を とする文献[59]に準拠する。 とする場合もある[60]が、その場合は分子分母を入れ替えて計算する。
- ^ 巻線の巻方向、電流の向きによって電圧の生じる極性が変化するため絶対値で表記している。
- ^ 巻線の巻方向、電流の向きによって電流の生じる極性が変化するため絶対値で表記している。
- ^ という関係において、、としたとき、 が成立するためには、とすればよい。
- ^ 回転磁界の速度を (同期速度)、回転速度を とすると、 で表される。 で停止、 で同期速度であり、通常動作時は 0.03 - 0.05 程度である[69][70]。
- ^ 閉磁路ではないため励磁電流が大きく、右図(d)における 、 による電圧降下が無視できないため。
- ^ 「力-電圧法」による表現による[78]
- ^ JEDEC JESD51-14 で規定されているモデル。
- ^ 熱過渡特性の測定法については、JEDEC JESD51-14 で規定されている[122]。
- ^ 透磁率が一定である材質であっても、断面積が小さくなったり、磁路長が長くなると磁気抵抗が大きくなることを示している。
- ^ とおくことで周波数特性は一致する。
- ^ この研究により、二人は1963年度のノーベル生理学・医学賞を受賞している

















出典
- ^ 電気回路理論 1969, p. 42.
- ^ a b 電気用語辞典 1982, p. 579.
- ^ a b 電子通信用語辞典 1984, p. 567.
- ^ トランジスタ技術SPECIAL(153) 2021, pp. 13, 26, 44.
- ^ a b MathWorks.
- ^ システム制御工学 2007, pp. 1–2.
- ^ システム制御工学 2007, pp. 3–5.
- ^ 基礎回路工学 1980, pp. 15–24, 148–156.
- ^ a b 基礎回路工学 1980, pp. 148–156.
- ^ 機械振動論 1960, pp. 27–31.
- ^ 電気音響振動学 1978, p. 72.
- ^ 機械回路の記号解析, p. 12.
- ^ 電気音響振動学 1978, pp. 191–213.
- ^ スピーカ計測評価技術.
- ^ 基礎回路工学 1980, pp. 156–169, 179–189.
- ^ 安田電子設計事務所.
- ^ 機械系と電子回路の対比, pp. 7–12.
- ^ 電気回路論 2008, pp. 64–66.
- ^ 電気回路論 2008, pp. 66–67.
- ^ 電気回路論 2008, pp. 9.90-91.
- ^ a b 工学基礎電気回路理論 1969, pp. 124–125.
- ^ 電気回路論 2008, pp. 126–127.
- ^ 基礎電気回路 1988, pp. 80–84.
- ^ 電気回路論 2008, p. 127.
- ^ 基礎電気回路 1988, pp. 85–87.
- ^ TechEyesOnline.
- ^ KOA.
- ^ 大同特殊鋼.
- ^ トランジスタ技術SPECIAL(138) 2017, pp. 26–27.
- ^ トランジスタ技術SPECIAL(141) 2018, pp. 165–166.
- ^ Panasonic_Ind.
- ^ トランジスタ技術SPECIAL(141) 2018, pp. 158–159.
- ^ a b MURATA.
- ^ a b Panasonic_Cap.
- ^ トランジスタ技術SPECIAL(138) 2017, pp. 12–15.
- ^ nichicon1-6 電気的特性
- ^ 電子回路(森北) 1986, pp. 113–114.
- ^ a b 電子回路基礎 1998, pp. 98–99.
- ^ 基礎電子回路工学 2009, pp. 208–210.
- ^ 電子回路(森北) 1986, pp. 18–19.
- ^ a b c 電子回路(森北) 1986, pp. 2–5.
- ^ アナログ電子回路(培風館) 1990, p. 47.
- ^ アナログ電子回路(培風館) 1990, pp. 50–51, 71.
- ^ アナログ電子回路(昭晃堂) 1990, pp. 30–33, 44.
- ^ 電子回路(森北) 1986, pp. 25–28.
- ^ 電子回路(森北) 1986, pp. 22–25.
- ^ アナログ電子回路(培風館) 1990, pp. 57–59, 76.
- ^ 電子回路(森北) 1986, pp. 12–14.
- ^ 電子回路学基礎 1986, pp. 62–63.
- ^ アナログ電子回路(培風館) 1990, p. 83.
- ^ 電子回路(森北) 1986, pp. 19–21.
- ^ 電子回路学基礎 1986, p. 65.
- ^ 電子回路学基礎 1986, p. 64.
- ^ a b 基礎電子回路 1992, pp. 81–83.
- ^ a b 電子回路基礎 1998, pp. 142–143.
- ^ トランジスタ技術SPECIAL(122) 2013, pp. 32–33.
- ^ 基礎電子回路 1992, pp. 90–93.
- ^ 電子回路基礎 1998, p. 147.
- ^ 電気機器工学(オーム) 1990, p. 13.
- ^ 電気回路アプローチ 1991, p. 193.
- ^ a b 電気回路アプローチ 1991, pp. 190–194.
- ^ 電気回路アプローチ 1991, pp. 196–197.
- ^ 電気機器工学(オーム) 1990, pp. 10–12.
- ^ 電気機器工学(コロナ) 2001, pp. 71–72.
- ^ a b 電気機器工学(オーム) 1990, pp. 12–15.
- ^ a b 電気機器工学(コロナ) 2001, pp. 72–74.
- ^ a b 電気機器工学(オーム) 1990, pp. 15–17.
- ^ a b 電気機器工学(コロナ) 2001, pp. 75–76.
- ^ 電気機器工学(オーム) 1990, p. 45.
- ^ 電気機器工学(コロナ) 2001, p. 113.
- ^ 電気機器工学(オーム) 1990, pp. 48–50.
- ^ 電気機器工学(コロナ) 2001, pp. 122–126.
- ^ 電気機器工学(コロナ) 2001, p. 126.
- ^ 電気工学ポケットブック 1959, p. 423.
- ^ a b MOTORエレクトロニクス(3) 2018, pp. 3–6.
- ^ a b TechWebMOTOR.
- ^ 電気音響振動学 1978, p. 79.
- ^ 電気音響振動学 1978, pp. 104–106.
- ^ a b 基礎回路工学 1980, p. 153.
- ^ 電気音響振動学 1978, pp. 79–84.
- ^ 音響音声工学 1992, pp. 53–57.
- ^ 基礎回路工学 1980, p. 154.
- ^ 電気音響振動学 1978, pp. 81–85.
- ^ 基礎回路工学 1980, p. 176.
- ^ 電気音響振動学 1978, pp. 78–80.
- ^ 電気工学ポケットブック 1959, pp. 1314–1315.
- ^ 熱設計完全制覇 2018, p. 43.
- ^ 電気工学ポケットブック 1959, pp. 24–26.
- ^ 基礎電気機器学 1985, pp. 18–20.
- ^ 基礎回路工学 1980, p. 152.
- ^ 電気音響振動学 1978, pp. 83–84.
- ^ 情報音響工学 1992, pp. 13–14.
- ^ 基礎回路工学 1980, pp. 149–150.
- ^ 電気音響振動学 1978, pp. 79–81.
- ^ 情報音響工学 1992, pp. 16–17.
- ^ 基礎回路工学 1980, pp. 150–151.
- ^ 電気音響振動学 1978, pp. 81–82.
- ^ 情報音響工学 1992, pp. 15–16.
- ^ 基礎回路工学 1980, p. 154-155.
- ^ 電気音響振動学 1978, pp. 84–85.
- ^ 電気音響振動学 1978, p. 81.
- ^ 基礎回路工学 1980, pp. 153–154.
- ^ 電気音響振動学 1978, pp. 82–83.
- ^ 基礎回路工学 1980, pp. 176–177.
- ^ 電気音響振動学 1978, p. 106.
- ^ 情報音響工学 1992, pp. 17–18.
- ^ 基礎回路工学 1980, pp. 173–174.
- ^ 電気音響振動学 1978, pp. 104–105.
- ^ 情報音響工学 1992, pp. 19–20.
- ^ 基礎回路工学 1980, pp. 174–175.
- ^ 電気音響振動学 1978, pp. 105–106.
- ^ 情報音響工学 1992, pp. 18–19.
- ^ a b c 熱モデル 2019, pp. 1–3.
- ^ 電子回路の熱設計 1989, pp. 20–21, 88–92.
- ^ 物理学通論I 1988, p. 244.
- ^ 電気工学ポケットブック 1959, p. 1314.
- ^ 電子回路の熱設計 1989, p. 91.
- ^ 電子回路の熱設計 1989, pp. 20–21, 71.
- ^ a b 電気回路ハンドブック 2016, p. 329.
- ^ 半導体デバイス熱抵抗 2015, pp. 1–3.
- ^ 熱設計手法 2019, pp. 119–121.
- ^ 過渡熱特性測定 2014, p. 6.
- ^ 電気工学ポケットブック 1959, p. 24.
- ^ 基礎電気機器学 1985, p. 14.
- ^ a b c 電気工学ポケットブック 1959, p. 25.
- ^ 基礎電気機器学 1985, pp. 14–15.
- ^ 基礎電気機器学 1985, pp. 18–19.
- ^ 基礎電気機器学 1985, p. 15.
- ^ a b 生体インピーダンス 2000, pp. 7–12.
- ^ 生体インピーダンス 2000, pp. 39–41.
- ^ a b TANITA.
- ^ 明治鍼灸医学, pp. 186–187.
- ^ 機械工学事典.
- ^ The_arterial_Windkessel, p. 3.
- ^ Journal of Physiology 1952, pp. 500–544.
- ^ 神経インパルス物語 2014, pp. 241–253.
- ^ 数学セミナー2022年7月号 2022, pp. 18–23.
- ^ 神経インパルス物語 2014, pp. 246–250.
- ^ 数学セミナー2022年7月号 2022, pp. 18–19.
参考文献
- 書籍
- 電気用語辞典編集委員会『電気用語辞典』(新)コロナ社、1982年。ISBN 4-339-00411-1。
- 末崎輝雄、天野弘『電気回路理論』 10巻(改訂)、コロナ社〈標準電気工学講座〉、1969年。ISBN 4-339-00169-4。
- トランジスタ技術SPECIAL編集部『ずっと使える電子回路テクニック101選』 153巻、CQ出版社〈トランジスタ技術SPECIAL〉、2021年。
- トランジスタ技術SPECIAL編集部『バーチャル学習!パソコン回路術』 141巻、CQ出版社〈トランジスタ技術SPECIAL〉、2018年。
- トランジスタ技術SPECIAL編集部『オームの法則から!絵ときの電子回路 超入門』 138巻、CQ出版社〈トランジスタ技術SPECIAL〉、2017年。
- トランジスタ技術SPECIAL編集部『やりなおしのための実用アナログ回路設計』 122巻、CQ出版社〈トランジスタ技術SPECIAL〉、2013年。
- 神林紀嘉『基礎 回路工学』 226巻、共立出版〈共立全書〉、1980年。
- 阿部健一、吉澤誠『システム制御工学』 3巻、朝倉書店〈電気・電子工学基礎シリーズ〉、2007年。ISBN 978-4-254-22876-2。
- 椎塚久雄『電気回路 -その理論と演習による基礎的アプローチ-』コロナ社、1991年。ISBN 4-339-00583-5。
- デン・ハルトック 著、谷口修・藤井澄二 訳『機械振動論』コロナ社、1960年。
- 石塚善雄『工学基礎としての電気回路理論』コロナ社、1969年。
- 石橋幸男『アナログ電子回路』培風館〈電子・情報工学講座〉、1990年。ISBN 4-563-03334-0。
- 松澤昭『基礎電子回路工学』オーム社〈電気学会大学講座〉、2009年。ISBN 978-4-88686-276-1。
- 相田貞蔵、田中拓史、中川貴、松原和宣『基礎電子回路』培風館、1992年。ISBN 4-563-03469-X。
- 根岸照雄、中根央、高田英一『電子回路基礎』コロナ社、1998年。ISBN 978-4-339-00690-2。
- 松元崇、篠崎寿夫『電子回路学の基礎』近代工学社、1986年。ISBN 4-87472-1192。
- 古井貞煕『音響・音声工学』 2巻、近代科学社〈電子・情報工学入門シリーズ〉、1992年。ISBN 4-7649-0196-X。
- 太田光雄、内野英治、生田顯、小泉卓也、小寺吉衛、和田卓郎 著、太田光雄 編『基礎情報音響工学』朝倉書店、1992年。ISBN 4-254-22028-6。
- 村上孝一『大学課程 電気機器工学』オーム社、1990年。ISBN 4-274-12868-7。
- 難波江章、金東海、高橋勲、仲村節男、山田速敬『基礎電気機器工学』オーム社〈電気学会大学講座〉、1985年。ISBN 4-88686-189-X。
- 前田勉、新谷邦弘『電気機器工学』 19巻、コロナ社〈電気・電子系教科書シリーズ〉、2001年。ISBN 978-4-339-01199-9。
- 藤澤幸穂『回転の原理は同じ!?「ブラシ付きモータ」と「ブラシレス・モータ」』 3巻、CQ出版社〈MOTORエレクトロニクス〉、2018年。
- 電気学会 編『電気工学ポケットブック(JR版)』オーム社、1959年。
- 小木曽建『電子回路の熱設計』工業調査会、1989年。ISBN 4-7693-1078-1。
- Hodgkin, Alan; Huxley, Andrew (August 1952). “A quantitative description of membrane current and its application to conduction and excitation in nerve”. The Journal of Physiology 117 (4).
- Alan J.McComas 著、酒井正樹・高畑雅一 訳『神経インパルス物語 ガルヴァーニの火花からイオンチャネルの分子構造まで』共立出版、2014年。ISBN 978-4-320-05731-9。
- 中垣俊之「ホジキン-ハクスレー模型に見る数学と生物学の頼もしい出会い」『数学セミナー』第729号、日本評論社、2022年6月。
- Web
- MathWorks. “等価回路”. MathWorks. 2021年11月15日閲覧。
- ROHM (2018年7月18日). “ブラシ付きDCモータの特性”. Tech Web Motor. ROHM. 2021年11月15日閲覧。
- 東陽テクニカ (2018年4月6日). “スピーカ計測・評価技術/第1回スピーカユニットの性能評価:TSパラメータ”. 東陽テクニカ. 東陽テクニカ. 2021年11月15日閲覧。
- 安田電子設計事務所. “機械振動系シミュレーション”. 安田電子設計事務所. 安田電子設計事務所. 2021年11月15日閲覧。
- 下条誠. “機械回路の記号解析” (pdf). 電気通信大学. 2021年11月15日閲覧。
- 根日屋英之 (2007年). “機械系と電子回路の対比” (pdf). 東京電機大学. 2021年11月15日閲覧。
- 吉田和信 (2009年). “システムと制御入門”. 2021年1月21日閲覧。
- TechEyesOnline (2020年6月23日). “LCRメータの基礎と概要 (第1回)”. 2021年11月15日閲覧。
- “抵抗器の留意点”. KOA. 2021年11月15日閲覧。
- “抵抗器の高周波特性”. 大同特殊鋼. 2021年11月15日閲覧。
- “インダクタ(コイル)の基礎知識(2)”. Panasonic. 2021年11月15日閲覧。
- MURATA. “コンデンサのインピーダンス ESRの周波数特性とは?”. 2021年11月15日閲覧。
- PANASONIC. “コンデンサの基礎知識(1)”. 2021年11月15日閲覧。
- ニチコン. “アルミニウム電解コンデンサの概要” (pdf). 2021年11月15日閲覧。 “1-6 電気的特性”
- “熱モデルとは” (pdf). No.62AN098J Rev.001. ROHM (2019年). 2021年11月15日閲覧。
- “高度化・高精度化に向けたエレクトロニクス熱設計手法” (pdf). DENSO (2019年). 2021年11月15日閲覧。
- “熱過渡特性測定システムの構築” (pdf). 神奈川県産業技術センター研究報告 (2014年). 2021年11月15日閲覧。
- 篠田卓也、井上鑑孝、伊藤哲也「半導体デバイス熱抵抗θJC の国際標準規格に対する提案」『日本伝熱学会論文集』第23巻第1号、2015年、1-4頁、doi:10.11368/tse.23.1、2022年8月1日閲覧。
- 國井洋臣『生体インピーダンスによる組織構造の推定に関する研究』 徳島大学〈博士 (工学) 甲第1114号〉、2000年。doi:10.11501/3167779。 NAID 500000188657。http://repo.lib.tokushima-u.ac.jp/96871。2022年8月1日閲覧。
- TANITA. “体組成計の原理”. 2021年11月15日閲覧。
- 森本安夫 (1985). 生体インピーダンスの話題 (PDF) (Report). Vol. 創刊号. 明治鍼灸医学. 2021年11月15日閲覧。
- “ウインドケッセルモデル”. 機械工学事典. 日本機械学会. 2021年11月15日閲覧。
- Nicolaas Westerhof; Jan-Willem Lankhaar,Berend E Westerhof (2008年). “The arterial Windkessel”. ResearchGate. ResearchGate. 2021年11月15日閲覧。





