Ez a szócikk nem tünteti fel a független forrásokat, amelyeket felhasználtak a készítése során. Emiatt nem tudjuk közvetlenül ellenőrizni, hogy a szócikkben szereplő állítások helytállóak-e. Segíts megbízható forrásokat találni az állításokhoz! Lásd még: A Wikipédia nem az első közlés helye. (2023 januárjából)
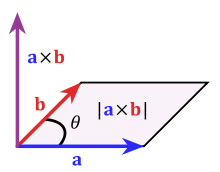
Egy paralelogramma területe mint két vektor vektoriális szorzatának nagysága
A vektoriális szorzat (más néven külső szorzat vagy keresztszorzat) háromdimenziós vektorokkal végzett olyan művelet, amelynek eredménye egy vektor. Míg a vektorok (és a rajtuk végzett műveletek közül például a skaláris szorzat) általánosíthatók több dimenzióra, a vektoriális szorzatot csak 3 dimenziós térben értelmezzük (7 dimenziós esetben is létezik vektoriális szorzat, ami azonban kevésbé használatos).
Jelölése: a×b vagy [ab] (szóban: a kereszt b), hogy megkülönböztessük a skaláris szorzattól. A kereszt jelölés a német és az angol szakirodalomban is használatos. Az olasz és a francia szakirodalom a , az orosz az vagy jelölést részesíti előnyben.
Az jelölés és a külső szorzat elnevezés egy másik műveletre is vonatkozhat, ami bivektort rendel a két vektorhoz. Lásd még: Graßmann-algebra.
Értelmezése:
Ha elképzelünk egy paralelogrammát, aminek szomszédos oldalait az a és b vektorok alkotják, akkor a×b nagysága (tehát az eredményvektor hossza) éppen megegyezik a két vektor által kifeszített paralelogramma területével. Másként,
Az eredményvektor nagysága (abszolútértéke, hossza) a két vektor hosszának és a közbezárt szögük szinuszának szorzata (0° ≤ θ ≤ 180°).
Az eredményvektor állása merőleges mind a-ra, mind b-re (az a és b vektorok síkjára).
Az eredményvektor iránya olyan, hogy az a, b és cjobbsodrású vektorrendszert alkot.
(Egy a, b, c vektorrendszert akkor hívunk jobbsodrásúnak, ha a jobb kezünk beállítható úgy, hogy hüvelykujjunk a-val, mutatóujjunk b-vel, középső ujjunk pedig (az előbbi két ujjunkra merőlegesen) c-vel azonos irányba mutat.)
Derékszögű koordináta-rendszerben a c eredményvektor koordinátáit a következőképp kapjuk a és b koordinátáiból:
Két vektor vektoriális szorzata akkor és csak akkor nullvektor, ha párhuzamos állásúak, hiszen ekkor a bezárt 0° vagy 180°, amiknek szinusza 0. Akkor lesz leghosszabb az eredményvektor, ha derékszögben állnak egymáshoz képest az összeszorzandó vektorok (mert 90° szinusza 1).
A fizikában számos helyen megjelenik, például az elektromágnesességben a Lorentz-erő vagy a Poynting-vektor kiszámolására. A klasszikus mechanikában a forgatómomentum és a forgatóimpulzus, vagy virtuális erők esetén, például a Coriolis-erő esetén.
A vektoriális szorzás és a keresztszorzás elnevezéseket először Josiah Willard Gibbs fizikus használta először; a külső szorzás kifejezés Hermann Graßmanntól származik.[1]
, tehát a hármas vektorszorzat nem asszociatív. De teljesíti a Jacobi-azonosságot: . Ez a linearitással és disztributivitással együtt azt eredményezi, hogy R3 a vektorok közti összeadással és vektoriális szorzással Lie-algebrát képez.
Bilinearitás
A vektoriális szorzat bilineáris,[2] azaz minden , és valós számra, illetve , és vektorra teljesül, hogy
Következik a skalárral való szorzásra:
Alternáló tulajdonság
Egy vektor önmagával vagy bármely skalárszorosával vett szorzata a nullvektor:
.
A bilineáris leképezések, melyekre ez a tulajdonság is teljesül, alternálók.[2]
ahol a pont a skaláris szorzást jelöli. Ez a tulajdonság egyértelműen meghatározza a skaláris szorzást:[2]
Minden vektor esetén fennáll, hogy tetszőleges , vektorokhoz pontosan egy vektor létezik úgy, hogy minden vektorra. Ez a vektor egyenlő az vektoriális szorzattal.
Graßmann-azonosság
Három vektor ismételt vektoriális szorzatára[3] teljesül a Graßmann-azonosság, más néven Graßmann kifejtési tétele, azaz
illetve
A fizikában gyakran az
írásmódot használják. Ez alapján a képletet nevezik BAC-CAB-képletnek is. Indexes írásmód esetén a Graßmann-azonosság:
.
ahol a Levi-Civita-szimbólum, és a Kronecker-delta.
Lagrange-azonosság
Két vektoriális szorzat skaláris szorzatára teljesül, hogy:[2]
A norma négyzetére kapjuk, hogy:
tehát a vektoriális szorzat normája:
Mivel az , vektorok közrezárt szöge, így mindig 0° és 180° közötti, azért . Innen a becslés:
.
Vektoriális szorzatok vektoriális szorzata
Speciális esetek:
Kifejtési tétel
Négyesszorzat:
, ahol módon a vegyes szorzat van jelölve.
Lagrange-azonosság:
(i=1,2,3) vektorok (i=1,2,3) reciprok rendszerét is a vektoriális szorzat segítségével számítjuk ki:
, ahol
Kiszámítása a derékszögű Descartes-féle koordináta-rendszerben
Jobbfogású Descartes-féle koordináta-rendszerben, illetve valós térben, a szabványos skalárszorzással és a szabványos orientációval:
Egy számpélda:
Előállítása mátrixszorzásként
Három dimenzióban két vektor közötti vektoriális szorzást átírhatunk egy 3×3-as antiszimmetrikus mátrix és egy vektor szorzatára a következőképpen:
Determinánsalak
, ahol i, j és k az egységvektorok.
A gyakorlatban ezek a módszerek könnyebben megjegyezhetőek és a számolást is egyszerűsítik.
Levezetés
Ha az euklideszi térben bevezetünk egy Descartes-féle koordináta-rendszert az egységvektorokkal, akkor a geometriai definíció és az antikommuitativitás miatt:
Kifejezve az tényezőket a bázisegységvektorokkal, a vektoriális szorzat így alakul:
Bilinearitás miatt:
Behelyettesítve a fenti vektoriális szorzatba:
Összevonva a megfelelő termeket:
Vektoriálisszorzó-mátrix
Legyen egy rögzített vektor! Ekkor a vektoriális szorzás egy lineáris leképezést definiál, ami egy tetszőleges vektort a vektorra képez. Ez azonosítható egy ferde másodfokú tenzorral. A standard bázis alkalmazása esetén megfelelő ferdén szimmetrikus mátrix
ahol
ugyanaz, mint a vektoriális szorzás -vel, azaz :
.
Ez a mátrix vektoriálisszorzó-mátrix. Úgy is jelölik, mint . Indexes jelöléssel:
ahol
.
Adott ferdén szimmetrikus mátrix esetén
,
ahol a mátrix transzponáltja. A hozzá tartozó vektor
.
Ha alakja , akkor a hozzá tartozó vektoriálisszorzó-mátrix
és minden indexre.
Ahol „“ diadikus szorzat.
Poláris és axiális vektorok
Vektoriális fizikai mennyiségekre alkalmazva a vektoriális szorzást különbséget tesznek poláris vagy eltolási vektorok (két helyvektor különbsége), és axiális, azaz forgatóvektorok között (ezek forgástengelyként működnek, például szögsebesség, forgatómomentum, forgatóimpulzus, mágneses folyamsűrűség).
A poláris vektorok szignatúrája +1, az axiális vektoroké −1. Vektoriális szorzáskor a szignatúrákat is összeszorozzák: ha a szignatúrák megegyeznek, akkor a szorzat axiális; különben a szorzat poláris. Azaz egy axiális vektor átviszi szignatúráját a szorzatra; ellenben a poláris vektor megfordítja az előjelet.
A vektoriális szorzásból származtatott műveletek
Vegyes szorzat
A vegyes szorzat megadja a három vektor által kifeszített paralelepipedon térfogatát
A vektorok vegyes szorzatának definíciója:
Az eredmény egy szám, ami megegyezik a három vektor által kifeszített paralelepipedon előjeles térfogatával. A vektoriális szorzat ábrázolható a három tényezőből alkotott mátrixszal:
Formálisan a rotációt a nabla operátor és a vektormező vektoriális szorzataként fejezik ki. Az itt m,egjelenő kifejezések nem szorzatok, hanem az operátorok alkalmazása a függvényekre; így a fenti tulajdonságok, például a Graßmann-azonosság nem teljesülnek. Ehelyett a nabla operátorral való számolás szabályai érvényesülnek.
Vektoriális szorzás más dimenziókban
A vektoriális szorzás általánosítható tetszőleges dimenzióra az térben. Ebben a tényezők száma nem 2, hanem , azaz például 2 dimenzióban egy vektor elég, de négy dimenzióban három kell.
Az vektorok vektoriális szorzatát az jellemzi, hogy minden esetén
A vektoriális szorzat koordinátái -ben a következőképpen számítjuk: Legyen az -edik standard egységvektor! Az vektorra:
teljesül, hogy a fenti determinánsos számoláshoz hasonlóan.
Az vektor ortogonális az vektorokra. Az irányítás olyan, hogy ebben a sorrendben jobbrendszert alkot. Az szorzat hossza megegyezik az által kifeszített parallelotóp dimenziós térfogatával.
Az esetben egy lineáris leképezést kapunk:
ami egy 90 fokos forgatás az óramutató járása szerint.
Itt meg kell jegyeznünk, hogy a tényezőkhöz hozzávéve a szorzatvektort csak páratlan dimenzióban kapunk jobbrendszert; páros dimenziókban balrendszert kapunk. Ez azon múlik, hogy páros dimenzióban nem ugyanaz a bázis, mint , ami definíció szerint jobbrendszer. Habár egy kisebb változtatással a definícióban páros dimenziókban is jobbrendszerre lehetne áttérni (azaz a szimbolikus determinánsban az egységvektorokat utolsó sorként vagy oszlopként megadni), ez a definíció nem terjedt el.
Egy további általánosítással Graßmann-algebrákhoz jutunk, melyek a differenciálgeometriában találnak alkalmazásra. Itt különféle fizikai területek részletesen modellezhetők, mint a klasszikus mechanika (szimplektikus sokaságok), a kvantumgeometria, illetve az általános relativitáselmélet. A szakirodalom elrejti a magasabb dimenziós, illetve görbült terekben definiált vektoriális szorzást, és inkább indexenként írja ki Levi-Civita-szimbólumokkal.
Komplex vektoriális szorzás
Komplex vektorterekben, például -ben a vektoriális szorzás definíciója a skaláris szorzástól függ. Ha az vektorok skaláris szorzását úgy választjuk, hogy az első tényező koordinátáit komplex konjugáljuk:
akkor a vektoriális szorzat számítható úgy, mint -ben, és a végén komplex konjugálva:
Alkalmazások
Alkalmazzák a geometriában kitérő egyenesek távolságának számítására.
Interaktív Java szimuláció két vektor vektoriális szorzatáról gömbi koordináták megadásával. Szerző: Wolfgang Bauer
Magyarított Flash animáció két vektor vektoriális szorzatának irányáról, ill. ennek kapcsolatáról a jobbkézszabállyal. Szerző: David M. Harrison
Forrás
Gerd Fischer: Lineare Algebra, Vieweg-Verlag, ISBN 3-528-97217-3.
Jegyzetek
↑Max Päsler. Grundzüge der Vektor- und Tensorrechnung. Walter de Gruyter, 33. o. (1977)
↑ abcdeHerbert Amann, Joachim Escher: Analysis. 2. Band 2. korrigierte Auflage. Birkhäuser-Verlag, Basel u. a. 2006, ISBN 3-7643-7105-6 (Grundstudium Mathematik), S. 312–313
↑Doppeltes Vektorprodukt (Vorlesungsskript Klassische und relativistische Mechanik, Othmar Marti, abgerufen am 2. Oktober 2020)
Ez a szócikk részben vagy egészben a https://de.wikipedia.org/wiki/Kreuzprodukt című német Wikipédia-szócikk fordításán alapul. Az eredeti cikk szerkesztőit annak laptörténete sorolja fel. Ez a jelzés csupán a megfogalmazás eredetét és a szerzői jogokat jelzi, nem szolgál a cikkben szereplő információk forrásmegjelöléseként.
Matematikaportál • összefoglaló, színes tartalomajánló lap


![{\displaystyle [{\vec {a}}\ {\vec {b}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f525d35f8edddf7a3f90c4d8666e165cc0ac5a00)
![{\displaystyle [{\vec {a}},{\vec {b}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/008d8868e90625dc41200b2396382596923b8d9c)









































































![{\displaystyle [{\vec {w}}]_{\times }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5df1ca3d4151f61cc9ccdd7a4b0e463f5ff5121f)







![{\displaystyle {W}=[{\vec {w}}]_{\times }={\vec {a}}\otimes {\vec {b}}-{\vec {b}}\otimes {\vec {a}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4f392bdb15ce8bf4d9a58f818866104c073637ff)








![{\displaystyle \operatorname {rot} {\vec {V}}=\nabla \times {\vec {V}}={\begin{pmatrix}{\frac {\partial }{\partial x_{1}}}\\[.5em]{\frac {\partial }{\partial x_{2}}}\\[.5em]{\frac {\partial }{\partial x_{3}}}\end{pmatrix}}\times {\begin{pmatrix}V_{1}\\[.5em]V_{2}\\[.5em]V_{3}\end{pmatrix}}={\begin{pmatrix}{\frac {\partial }{\partial x_{2}}}V_{3}-{\frac {\partial }{\partial x_{3}}}V_{2}\\[.5em]{\frac {\partial }{\partial x_{3}}}V_{1}-{\frac {\partial }{\partial x_{1}}}V_{3}\\[.5em]{\frac {\partial }{\partial x_{1}}}V_{2}-{\frac {\partial }{\partial x_{2}}}V_{1}\end{pmatrix}}={\begin{pmatrix}{\frac {\partial V_{3}}{\partial x_{2}}}-{\frac {\partial V_{2}}{\partial x_{3}}}\\[.5em]{\frac {\partial V_{1}}{\partial x_{3}}}-{\frac {\partial V_{3}}{\partial x_{1}}}\\[.5em]{\frac {\partial V_{2}}{\partial x_{1}}}-{\frac {\partial V_{1}}{\partial x_{2}}}\end{pmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/76fc4a22ce14a3ff684e6269ed0675da48fb7eac)



























 Matematikaportál • összefoglaló, színes tartalomajánló lap
Matematikaportál • összefoglaló, színes tartalomajánló lap








