Dieser Artikel behandelt die Multiplikation zweier Vektoren, deren Ergebnis ein Skalar ist. Für die Multiplikation von Vektoren mit Skalaren, deren Ergebnis ein Vektor ist, siehe Skalarmultiplikation.
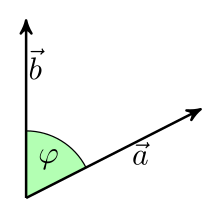
Das Skalarprodukt zweier Vektoren im euklidischen Anschauungsraum hängt von der Länge der Vektoren und dem eingeschlossenen Winkel ab.
Das Skalarprodukt (auch inneres Produkt oder Punktprodukt) ist eine mathematische Verknüpfung, die zwei Vektoren eine Zahl (Skalar) zuordnet. Es ist Gegenstand der analytischen Geometrie und der linearen Algebra. Historisch wurde es zuerst im euklidischen Raum eingeführt. Geometrisch berechnet man das Skalarprodukt zweier Vektoren und nach der Formel
Dabei bezeichnen und jeweils die Längen (Beträge) der Vektoren. Mit wird der Kosinus des von den beiden Vektoren eingeschlossenen Winkels (Phi) bezeichnet. Das Skalarprodukt zweier Vektoren gegebener Länge ist damit null, wenn sie senkrecht zueinander stehen, und maximal, wenn sie die gleiche Richtung haben.
In einem kartesischen Koordinatensystem berechnet sich das Skalarprodukt zweier Vektoren und als
Kennt man die kartesischen Koordinaten der Vektoren, so kann man mit dieser Formel das Skalarprodukt und daraufhin mit der Formel aus dem vorhergehenden Absatz den Winkel zwischen den beiden Vektoren ausrechnen, indem diese nach aufgelöst wird:
In der linearen Algebra wird dieses Konzept für beliebig viele Dimensionen zu
verallgemeinert.
Noch allgemeiner versteht man in der linearen Algebra unter einem Skalarprodukt eine Funktion, die zwei Elementen eines reellen oder komplexen Vektorraums einen Skalar zuordnet, genauer eine (positiv definite) hermitesche Sesquilinearform bzw. spezieller bei reellen Vektorräumen eine (positiv definite) symmetrische Bilinearform. Im Allgemeinen ist in einem Vektorraum von vornherein kein Skalarprodukt festgelegt. Ein Raum zusammen mit einem Skalarprodukt wird als Innenproduktraum oder Prähilbertraum bezeichnet. Diese Vektorräume verallgemeinern den euklidischen Raum und ermöglichen damit die Anwendung geometrischer Methoden auf abstrakte Strukturen.
Inhaltsverzeichnis
1Im euklidischen Raum
1.1Geometrische Definition und Notation
1.1.1Veranschaulichung
1.1.2Beispiele
1.2In kartesischen Koordinaten
1.2.1Beispielrechnung
1.3Eigenschaften
1.4Betrag von Vektoren und eingeschlossener Winkel
1.4.1Beispielrechnung
1.5Orthogonalität und orthogonale Projektion
1.6Bezug zum Kreuzprodukt
1.7Anwendungen
1.7.1In der Geometrie
1.7.2In der Analytischen Geometrie
1.7.3In der linearen Algebra
1.7.4In der Physik
2In allgemeinen reellen und komplexen Vektorräumen
2.1Definition (Axiomatik)
2.2Beispiele
2.2.1Standardskalarprodukt im Rn und im Cn
2.2.2Allgemeine Skalarprodukte im Rn und im Cn
2.2.3L2-Skalarprodukt für Funktionen
2.2.4Frobenius-Skalarprodukt für Matrizen
2.3Norm, Winkel und Orthogonalität
2.4Matrixdarstellung
3Verallgemeinerung
4Siehe auch
5Literatur
6Weblinks
7Einzelnachweise
Im euklidischen Raum
Geometrische Definition und Notation
Vektoren im dreidimensionalen euklidischen Raum oder in der zweidimensionalen euklidischen Ebene kann man als Pfeile darstellen. Dabei stellen Pfeile, die parallel, gleich lang und gleich orientiert sind, denselben Vektor dar. Das Skalarprodukt zweier Vektoren und ist ein Skalar, das heißt eine reelle Zahl. Geometrisch lässt es sich wie folgt definieren:
Bezeichnen und die Längen der Vektoren und und bezeichnet den von und eingeschlossenen Winkel, so ist
Streng genommen muss hierbei vorausgesetzt werden, da ansonsten nicht erklärt ist. Ist oder , so wird gesetzt.
Wie bei der normalen Multiplikation (aber seltener als dort) wird, wenn klar ist, was gemeint ist, das Multiplikationszeichen manchmal weggelassen:
Statt schreibt man in diesem Fall gelegentlich auch vereinfacht oder
Andere übliche Notationen sind und
Veranschaulichung
Orthogonale Projektion des Vektors auf die durch bestimmte Richtung
Um sich die Definition zu veranschaulichen, betrachtet man die orthogonale Projektion des Vektors auf die durch bestimmte Richtung und setzt
Es gilt dann und für das Skalarprodukt von und gilt:
Diese Beziehung wird manchmal auch zur Definition des Skalarprodukts verwendet.
Beispiele
In allen drei Beispielen gilt und . Die Skalarprodukte ergeben sich mithilfe der speziellen Kosinuswerte , und :
und gleichgerichtet
und im 60°-Winkel
und orthogonal
In kartesischen Koordinaten
Führt man in der euklidischen Ebene bzw. im euklidischen Raum kartesische Koordinaten ein, so besitzt jeder Vektor eine Koordinatendarstellung als 2- bzw. 3-Tupel, das meist als Spalte geschrieben wird.
In der euklidischen Ebene erhält man dann für das Skalarprodukt der Vektoren
und
die Darstellung
Kanonische Einheitsvektoren in der euklidischen Ebene
Für die kanonischen Einheitsvektoren und gilt nämlich
und .
Daraus folgt (unter Vorwegnahme der weiter unten erläuterten Eigenschaften des Skalarproduktes)
Im dreidimensionalen euklidischen Raum erhält man entsprechend für die Vektoren
und
die Darstellung
Beispielrechnung
Das Skalarprodukt der beiden Vektoren
und
berechnet sich als
.
Eigenschaften
Aus der geometrischen Definition ergibt sich direkt:
Sind und parallel und gleichorientiert (), so gilt
Insbesondere ergibt das Skalarprodukt eines Vektors mit sich selbst das Quadrat seiner Länge:
Sind und parallel und entgegengesetzt orientiert (), so gilt
Sind und orthogonal (), so gilt
Ist ein spitzer Winkel, so gilt
Ist ein stumpfer Winkel, so gilt
(Cauchy-Schwarzsche Ungleichung) und sind linear abhängig.
Als Funktion, die jedem geordneten Paar von Vektoren die reelle Zahl zuordnet, hat das Skalarprodukt folgende Eigenschaften, die man von einer Multiplikation erwartet:
Es ist symmetrisch (Kommutativgesetz):
für alle Vektoren und .
Es ist homogen in jedem Argument (gemischtes Assoziativgesetz):
für alle Vektoren und und alle Skalare .
Es ist additiv in jedem Argument (Distributivgesetz):
und
für alle Vektoren und
Die Eigenschaften 2 und 3 fasst man auch zusammen zu: Das Skalarprodukt ist bilinear.
Die Bezeichnung „gemischtes Assoziativgesetz“ für die 2. Eigenschaft verdeutlicht, dass dabei ein Skalar und zwei Vektoren so verknüpft werden, dass die Klammern wie beim Assoziativgesetz verschoben werden können. Da das Skalarprodukt keine innere Verknüpfung ist, ist ein Skalarprodukt von drei Vektoren nicht definiert, daher stellt sich die Frage nach einer echten Assoziativität nicht. Im Ausdruck ist nur die erste Multiplikation ein Skalarprodukt von zwei Vektoren, die zweite ist das Produkt eines Skalars mit einem Vektor (S-Multiplikation). Der Ausdruck stellt einen Vektor dar, ein Vielfaches des Vektors Hingegen stellt der Ausdruck ein Vielfaches von dar. Im Allgemeinen gilt also
Weder die geometrische Definition noch die Definition in kartesischen Koordinaten ist willkürlich. Beide folgen aus der geometrisch motivierten Forderung, dass das Skalarprodukt eines Vektors mit sich selbst das Quadrat seiner Länge ist, und der algebraisch motivierten Forderung, dass das Skalarprodukt die obigen Eigenschaften 1–3 erfüllt.
Betrag von Vektoren und eingeschlossener Winkel
Indem man die geometrische Definition mit der Koordinatendarstellung kombiniert, kann man die Länge (den Betrag) eines Vektors und den von zwei Vektoren eingeschlossenen Winkel aus den Koordinaten der Vektoren berechnen:
Für einen Vektor des zweidimensionalen Raumes gilt
Man erkennt hier den Satz des Pythagoras wieder. Im dreidimensionalen Raum gilt für entsprechend
Zur Berechnung des eingeschlossenen Winkels zwischen zwei Vektoren stellt man die Definitionsgleichung nach um:
Die einzelnen Bestandteile und kann man mit den entsprechenden Formeln für die kartesischen Koordinaten berechnen. Um den Winkel zu erhalten, muss man noch den Arkuskosinus auf das Ergebnis der Rechnung anwenden:
.
Beispielrechnung
Die Vektoren
und
haben die Länge
und
Der Kosinus des von den beiden Vektoren eingeschlossenen Winkels berechnet sich zu
Orthogonale Projektion des Vektors auf die durch bestimmte Richtung
Zwei Vektoren und sind genau dann orthogonal, wenn ihr Skalarprodukt null ist, also
Die orthogonale Projektion von auf die durch den Vektor gegebene Richtung ist der Vektor
Die Projektion ist der Vektor, dessen Endpunkt der Lotfußpunkt vom Endpunkt von auf die durch bestimmte Gerade durch den Nullpunkt ist. Der Vektor steht senkrecht auf
Ist ein Einheitsvektor (d. h., ist ), so vereinfacht sich die Formel zu
Bezug zum Kreuzprodukt
Eine andere Art und Weise, zwei Vektoren und im dreidimensionalen Raum multiplikativ miteinander zu verknüpfen, ist das äußere Produkt oder Kreuzprodukt Im Gegensatz zum Skalarprodukt ist das Resultat des Kreuzprodukts kein Skalar, sondern wieder ein Vektor. Dieser Vektor steht senkrecht auf der von den beiden Vektoren und aufgespannten Ebene und seine Länge entspricht dem Flächeninhalt des Parallelogramms, das von diesen aufgespannt wird.
Für die Verbindung von Kreuz- und Skalarprodukt gelten die folgenden Rechenregeln:[4]
Die Kombination aus Kreuzprodukt und Skalarprodukt der ersten beiden Regeln nennt man auch Spatprodukt; es ergibt das orientierte Volumen des durch die drei Vektoren aufgespannten Parallelepipeds.
Anwendungen
In der Geometrie
Kosinussatz mit Vektoren
Das Skalarprodukt ermöglicht es, komplizierte Sätze, bei denen von Winkeln die Rede ist, einfach zu beweisen.
Beweis: Mit Hilfe der eingezeichneten Vektoren folgt (Die Richtung von ist unerheblich.) Quadrieren des Betrags ergibt
und damit
In der Analytischen Geometrie
Mit Hilfe des Skalarproduktes kann man eine Gerade in der Ebene, eine Ebene im dreidimensionalen Raum oder allgemein eine Hyperebene in der Normalenform – also mit Hilfe eines Normalenvektors – darstellen:
, mit Stützvektor und Normalenvektor .
Eine Gerade, Ebene bzw. Hyperebene besteht dann aus denjenigen Punkten, deren Ortsvektoren die Gleichung erfüllen. Im Gegensatz zur Punktrichtungsform handelt es sich hierbei um eine Gleichung ohne Parameter.
In der linearen Algebra
Unter Verwendung des Skalarproduktes kann man jede der Gleichungen eines linearen Gleichungssystems mit Variablen
In der Physik sind viele Größen durch das Skalarprodukt definiert, wie zum Beispiel die Arbeit :
mit den vektoriellen Größen Kraft und Weg . Dabei bezeichnet den Winkel zwischen der Richtung der Kraft und der Richtung des Weges. Mit wird die Komponente der Kraft in Richtung des Weges bezeichnet, mit die Komponente des Weges in Richtung der Kraft.
Beispiel: Ein Wagen des Gewichts wird über eine schiefe Ebene von nach transportiert. Die Hubarbeit berechnet sich zu
In allgemeinen reellen und komplexen Vektorräumen
Man nimmt die obigen Eigenschaften zum Anlass, den Begriff des Skalarprodukts auf beliebige reelle und komplexeVektorräume zu verallgemeinern. Ein Skalarprodukt ist dann eine Funktion, die zwei Vektoren ein Körperelement (Skalar) zuordnet und die genannten Eigenschaften erfüllt. Im komplexen Fall modifiziert man dabei die Bedingung der Symmetrie und der Bilinearität, um die Positivdefinitheit zu retten (die für komplexe symmetrische Bilinearformen nie erfüllt ist).
In der allgemeinen Theorie werden die Variablen für Vektoren, also Elemente eines beliebigen Vektorraums, im Allgemeinen nicht durch Pfeile gekennzeichnet. Das Skalarprodukt wird meist nicht durch einen Malpunkt, sondern durch ein Paar von spitzen Klammern bezeichnet. Für das Skalarprodukt der Vektoren und schreibt man also . Andere gebräuchliche Notationen sind (vor allem in der Quantenmechanik in Form der Bra-Ket-Notation), und .
Definition (Axiomatik)
Ein Skalarprodukt oder inneres Produkt auf einem reellen Vektorraum ist eine positiv definite symmetrische Bilinearform das heißt, für und gelten die folgenden Bedingungen:
Ein reeller oder komplexer Vektorraum, in dem ein Skalarprodukt definiert ist, heißt Skalarproduktraum oder Prähilbertraum. Ein endlichdimensionaler reeller Vektorraum mit Skalarprodukt wird auch euklidischer Vektorraum genannt, im komplexen Fall spricht man von einem unitären Vektorraum. Entsprechend wird das Skalarprodukt in einem euklidischen Vektorraum gelegentlich als euklidisches Skalarprodukt, das in einem unitären Vektorraum als unitäres Skalarprodukt bezeichnet. Die Bezeichnung „euklidisches Skalarprodukt“ wird aber auch speziell für das oben beschriebene geometrische Skalarprodukt oder das weiter unten beschriebene Standardskalarprodukt im benutzt.
Anmerkungen
Oft wird jede symmetrische Bilinearform bzw. jede hermitesche Sesquilinearform als Skalarprodukt bezeichnet; mit diesem Sprachgebrauch beschreiben die obigen Definitionen positiv definite Skalarprodukte.
Die beiden angegebenen Axiomensysteme sind nicht minimal. Im reellen Fall folgt aufgrund der Symmetrie die Linearität im ersten Argument aus der Linearität im zweiten Argument (und umgekehrt). Analog dazu folgt im komplexen Fall aufgrund der Hermitezität die Semilinearität im ersten Argument aus der Linearität im zweiten Argument (und umgekehrt).
Im komplexen Fall wird das Skalarprodukt manchmal alternativ, nämlich als linear im ersten und semilinear im zweiten Argument definiert. Diese Version tritt bevorzugt in der Mathematik und insbesondere in der Analysis auf, während in der Physik überwiegend die obige Version benutzt wird (siehe Bra- und Ket-Vektoren). Der Unterschied beider Versionen liegt in den Auswirkungen der Skalarmultiplikation hinsichtlich der Homogenität. Nach der Alternativversion gilt für und und . Die Additivität wird in beiden Versionen gleich verstanden. Ebenso sind die nach beiden Versionen aus dem Skalarprodukt gewonnenen Normen identisch.[5]
Ein Prähilbertraum, der vollständig bezüglich der durch das Skalarprodukt induzierten Norm ist, wird als Hilbertraum bezeichnet.
Die Unterscheidung zwischen reellem und komplexem Vektorraum bei der Definition des Skalarprodukts ist nicht zwingend notwendig, da eine hermitesche Sesquilinearform im Reellen einer symmetrischen Bilinearform entspricht.
Ausgehend von der Darstellung des euklidischen Skalarprodukts in kartesischen Koordinaten definiert man in der linearen Algebra das Standardskalarprodukt im -dimensionalen Koordinatenraum für durch
Das oben behandelte „geometrische“ Skalarprodukt im euklidischen Raum entspricht so dem Spezialfall Im Fall des -dimensionalen komplexen Vektorraums definiert man das Standardskalarprodukt für durch
wobei der Überstrich die komplexe Konjugation bedeutet. In der Mathematik ist häufig auch die alternative Version gebräuchlich, bei der das zweite Argument statt des ersten konjugiert wird.
Das Standardskalarprodukt im bzw. lässt sich auch als Matrizenprodukt schreiben, indem man den Vektor als -Matrix (Spaltenvektor) interpretiert: Im reellen Fall gilt
wobei der Zeilenvektor ist, der aus dem Spaltenvektor durch Transponieren hervorgeht. Im komplexen Fall gilt (für den links semilinearen, rechts linearen Fall)
ein Skalarprodukt; ebenso wird im komplexen Fall für jede positiv definite hermitesche Matrix über
ein Skalarprodukt definiert. Hier bezeichnen die spitzen Klammern auf der rechten Seite das Standardskalarprodukt, die spitzen Klammern mit dem Index auf der linken Seite das durch die Matrix definierte Skalarprodukt.
Jedes Skalarprodukt auf bzw. lässt sich auf diese Art durch eine positiv definite symmetrische Matrix (bzw. positiv definite hermitesche Matrix) darstellen.
Auf dem unendlichdimensionalen Vektorraum der stetigen reellwertigen Funktionen auf dem Intervall ist das -Skalarprodukt durch
für alle , definiert. Die Voraussetzung der Stetigkeit kann dabei abgeschwächt werden (siehe Lp-Raum), denn bspw. ist das L2-Skalarprodukt auch für Treppenfunktionen wohldefiniert.
Des Weiteren lässt sich auch ein Skalarprodukt (-Skalarprodukt) definieren bei dem zusätzlich Ableitungsterme hinzukommen:
für alle . Auch hier kann die Voraussetzung der Differenzierbarkeit abgeschwächt werden (siehe Sobolev-Raum).
Auf dem Matrizenraum der reellen -Matrizen wird für durch
ein Skalarprodukt definiert. Entsprechend wird auf dem Raum der komplexen -Matrizen für durch
ein Skalarprodukt definiert. Dieses Skalarprodukt wird Frobenius-Skalarprodukt genannt und die dazugehörige Norm heißt Frobeniusnorm.
Norm, Winkel und Orthogonalität
Der Länge eines Vektors im euklidischen Raum entspricht in allgemeinen Skalarprodukträumen die vom Skalarprodukt induzierte Norm. Man definiert diese Norm, indem man die Formel für die Länge aus dem euklidischen Raum überträgt, als die Wurzel des Skalarprodukts des Vektors mit sich selbst:
umgeformt werden. Daher lässt sich auch in allgemeinen reellen Vektorräumen mittels
der Winkel zweier Vektoren definieren. Der so definierte Winkel liegt zwischen 0° und 180°, also zwischen 0 und Für Winkel zwischen komplexen Vektoren gibt es eine Reihe unterschiedlicher Definitionen.[6]
Auch im allgemeinen Fall nennt man Vektoren, deren Skalarprodukt gleich Null ist, orthogonal:
Matrixdarstellung
Ist ein -dimensionaler Vektorraum und eine Basis von so kann jedes Skalarprodukt auf durch eine ()-Matrix die Gramsche Matrix des Skalarprodukts, beschrieben werden. Ihre Einträge sind die Skalarprodukte der Basisvektoren:
mit für
Das Skalarprodukt lässt sich dann mit Hilfe der Basis darstellen: Haben die Vektoren bezüglich der Basis die Darstellung
im komplexen Fall. Bezüglich einer Orthonormalbasis entspricht das Skalarprodukt von und also dem Standardskalarprodukt der Koordinatenvektoren und bzw.
Video: Von Vektoren und ihrem Skalarprodukt – Vektorrechnung Teil 1. Jakob Günter Lauth (SciFox) 2013, zur Verfügung gestellt von der Technischen Informationsbibliothek (TIB), doi:10.5446/17886.
Einzelnachweise
↑Ilja Nikolajewitsch Bronstein, Konstantin Adolfowitsch Semendjajew: Taschenbuch der Mathematik. 5. Auflage. Verlag Harri Deutsch, ISBN 3-8171-2005-2, S.189.
↑Bronstein, Semendjajew: Taschenbuch der Mathematik, 2001, S. 191.






































 und gleichgerichtet
und gleichgerichtet und im 60°-Winkel
und im 60°-Winkel und orthogonal
und orthogonal




































































































































![{\displaystyle C^{0}([a,b],\mathbb {R} )}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9031f182bf36a2537c1747fe6a7f7ee2461b6bdb)
![{\displaystyle [a,b]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935)


![{\displaystyle f,g\in C^{0}([a,b],\mathbb {R} )}](https://wikimedia.org/api/rest_v1/media/math/render/svg/97d766f23dd6e08b9abc30da269fabe6663e78e2)


![{\displaystyle f,g\in C^{1}([a,b],\mathbb {R} )}](https://wikimedia.org/api/rest_v1/media/math/render/svg/51c78e40dd517052c0b719122bc1f1eeb4a7ac7d)



















































